





. That’s just happen an event FCR invitation 2017 DK, There’re a arduino based CHESS robotic System shown on the event. 300 kids to view the Robot, and playing with robot, and got lots of smile one kids’s face. That’s the FCR invitation, an STEM progrom newest for kids worldwide. now to intro the 1st show system of this program.
 PREPARing to equip the FlameChess Robotic system.
PREPARing to equip the FlameChess Robotic system.
. March 8 Happy Women’s Day. 2:09am time difference between KPH & BJ, best time to equipped with the robot – 1st demo system of Flamechess Robotic. Really like this large cafe, more audience [color]






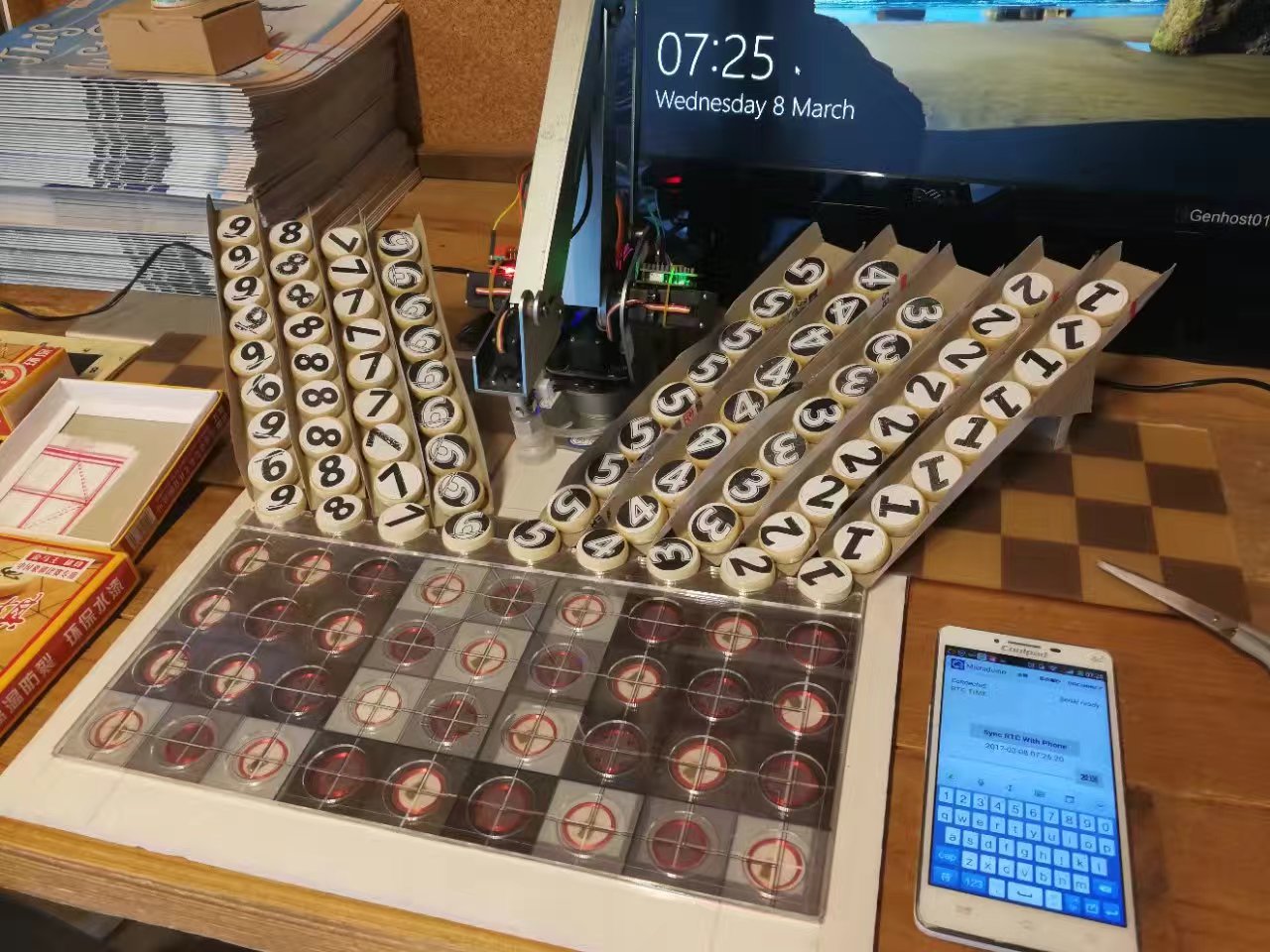
- Cloud Chess Board and FlameChess robot (brain)
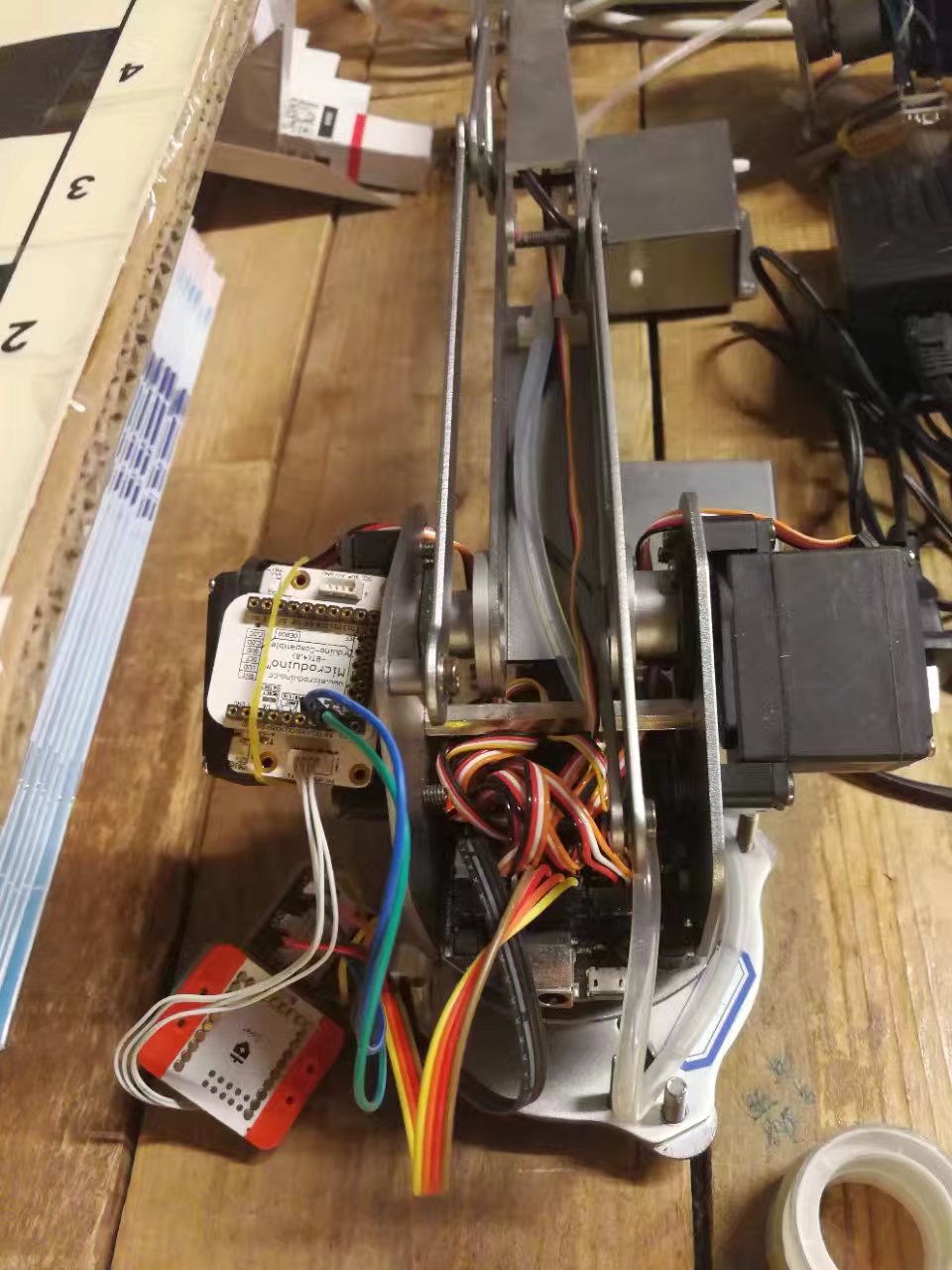
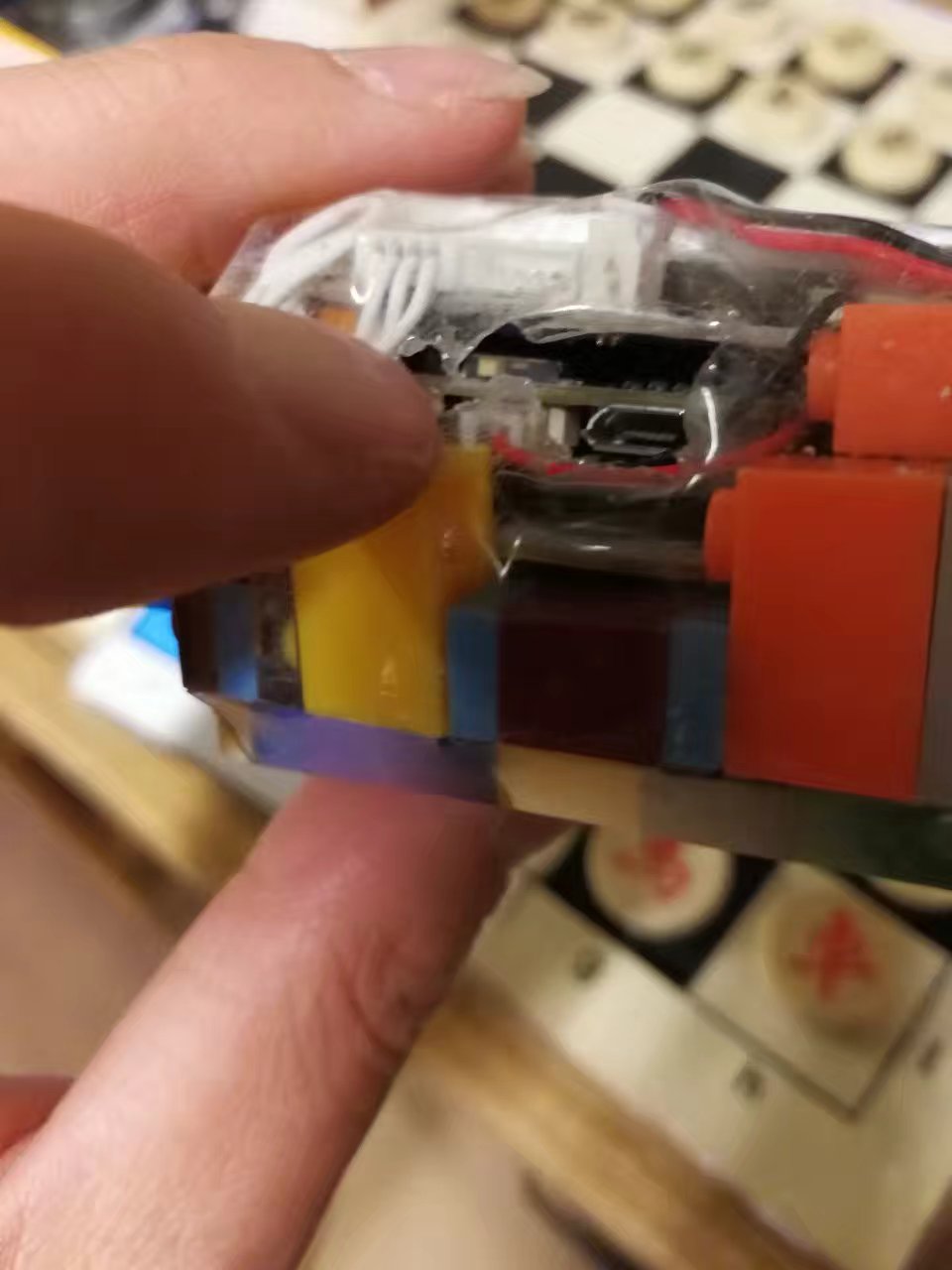
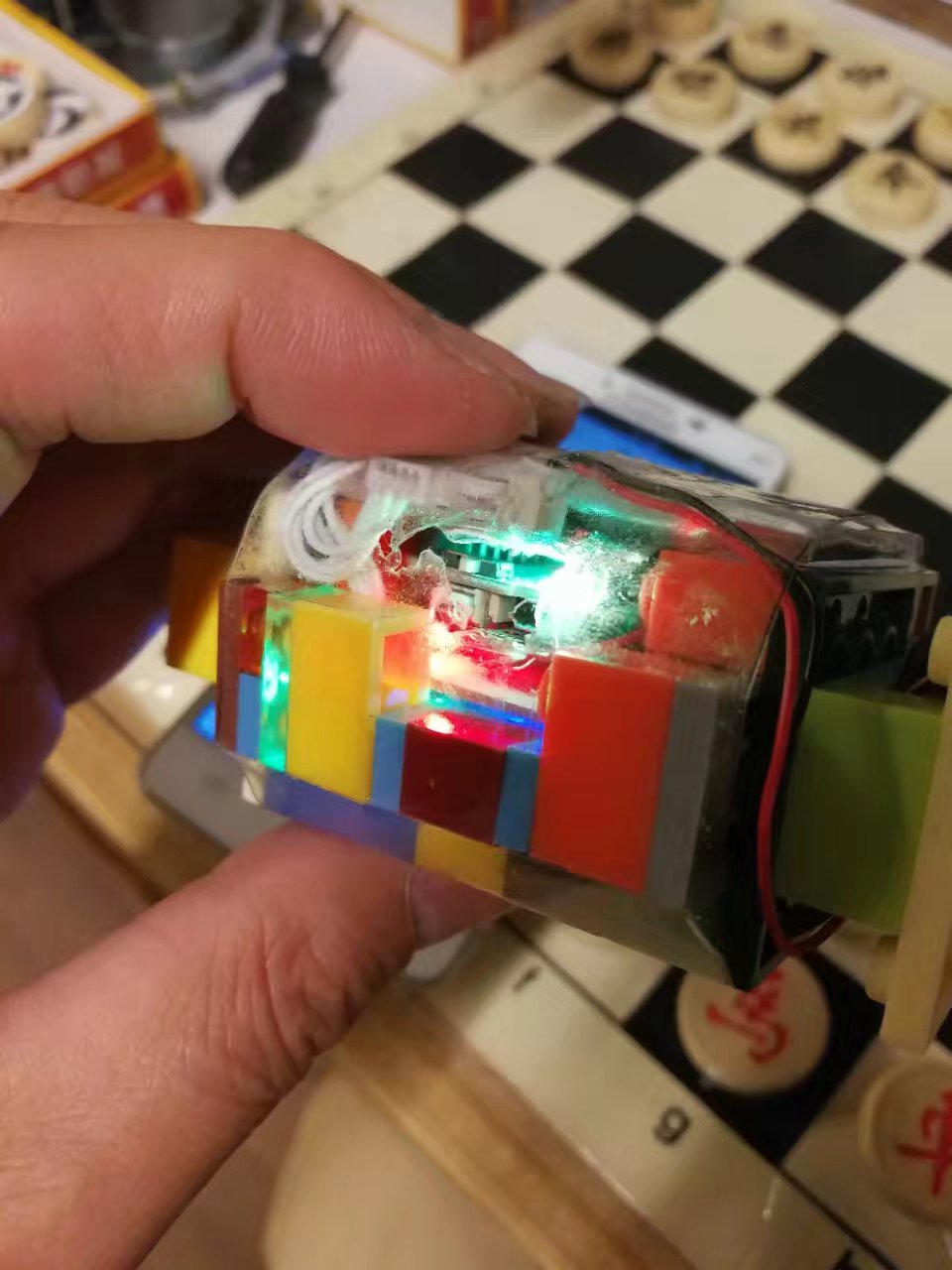
- The main arm, the module that receives the command is equipped above. (Bluetooth BLE transmission), including communication from the slave robot arm, dual Bluetooth channel.
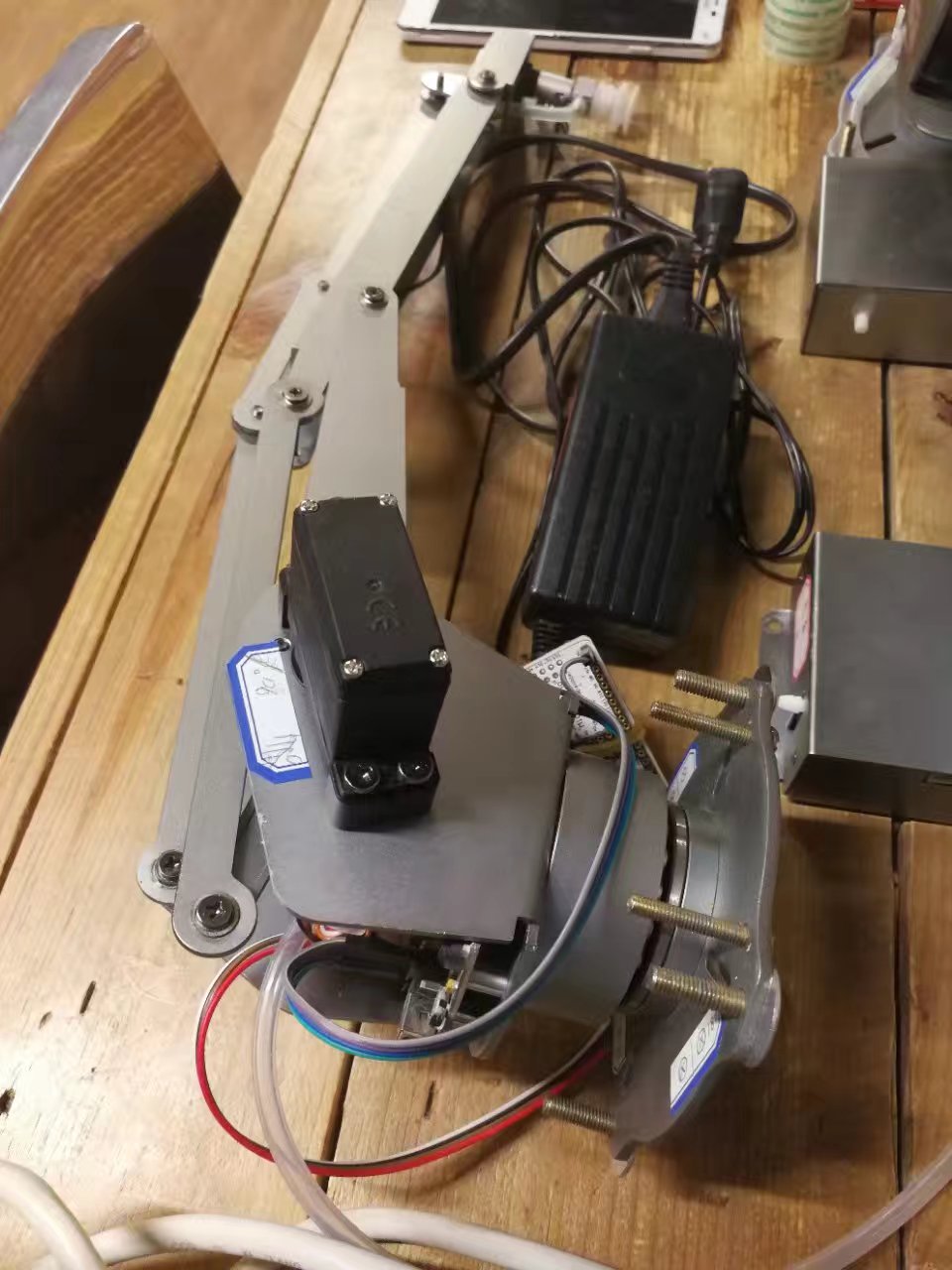
- the slave robotic arm, and the power cord, next to the 2 (toy) air pump [smile], to grab the pawn is proper enough.
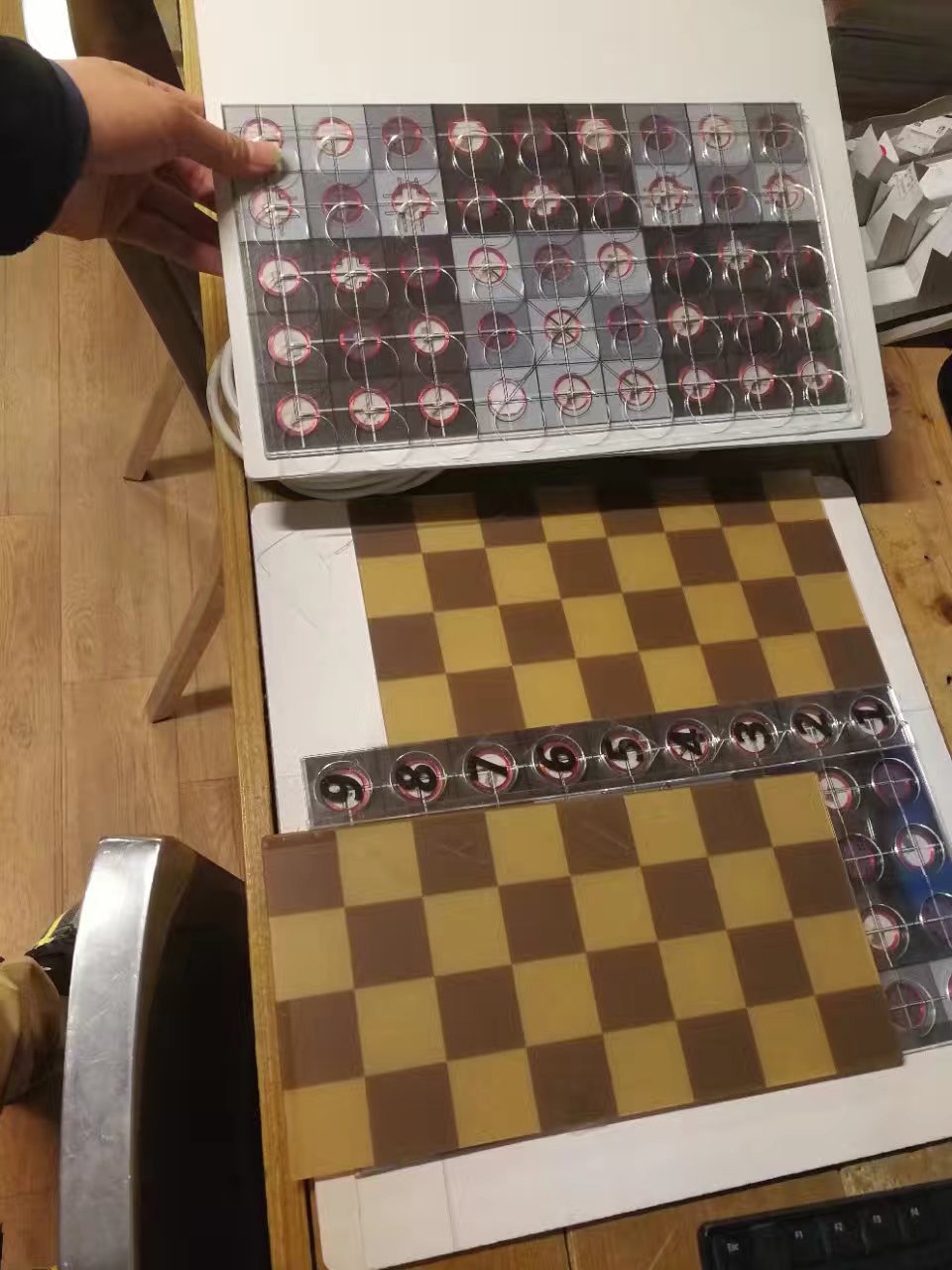
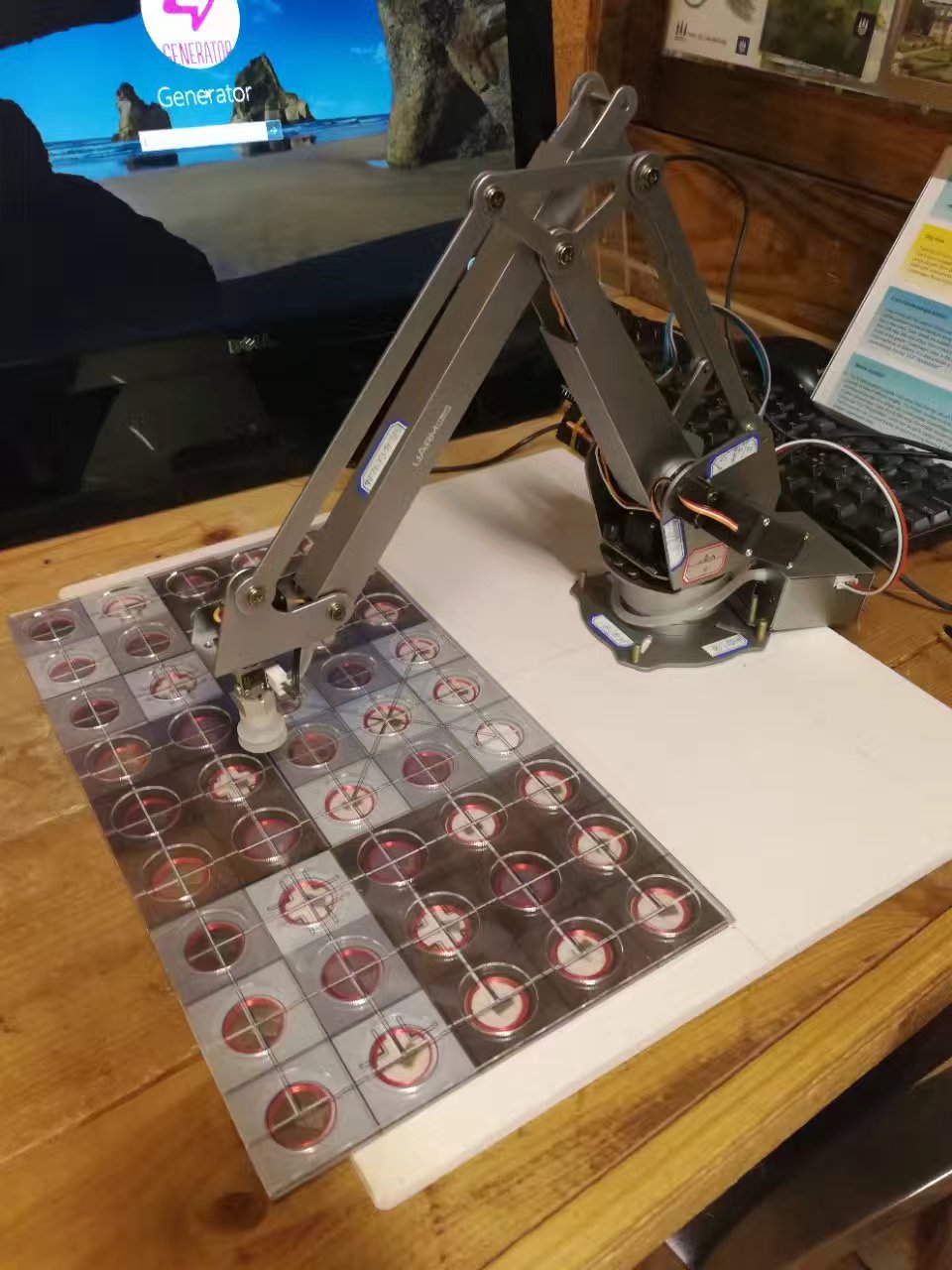
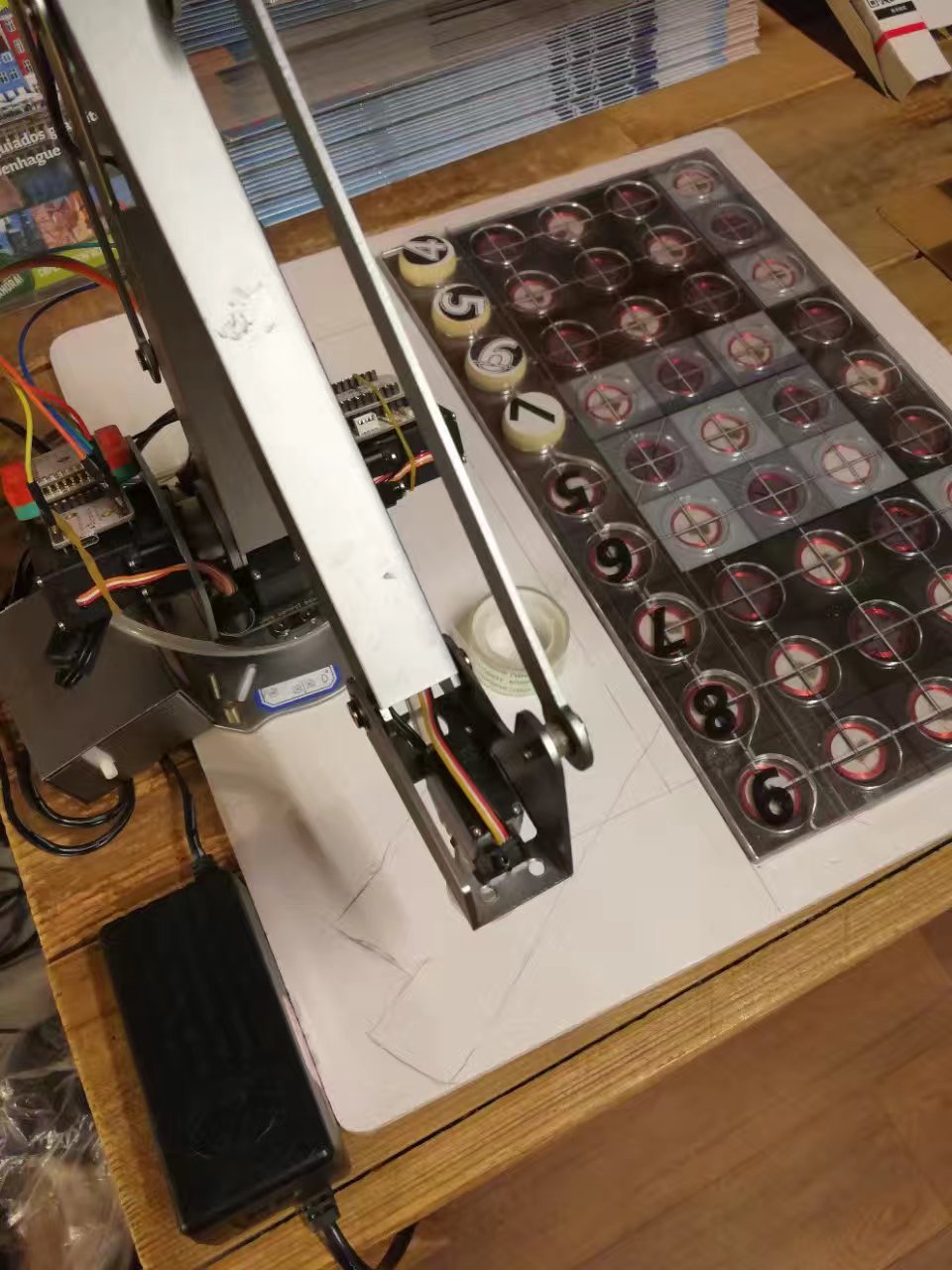
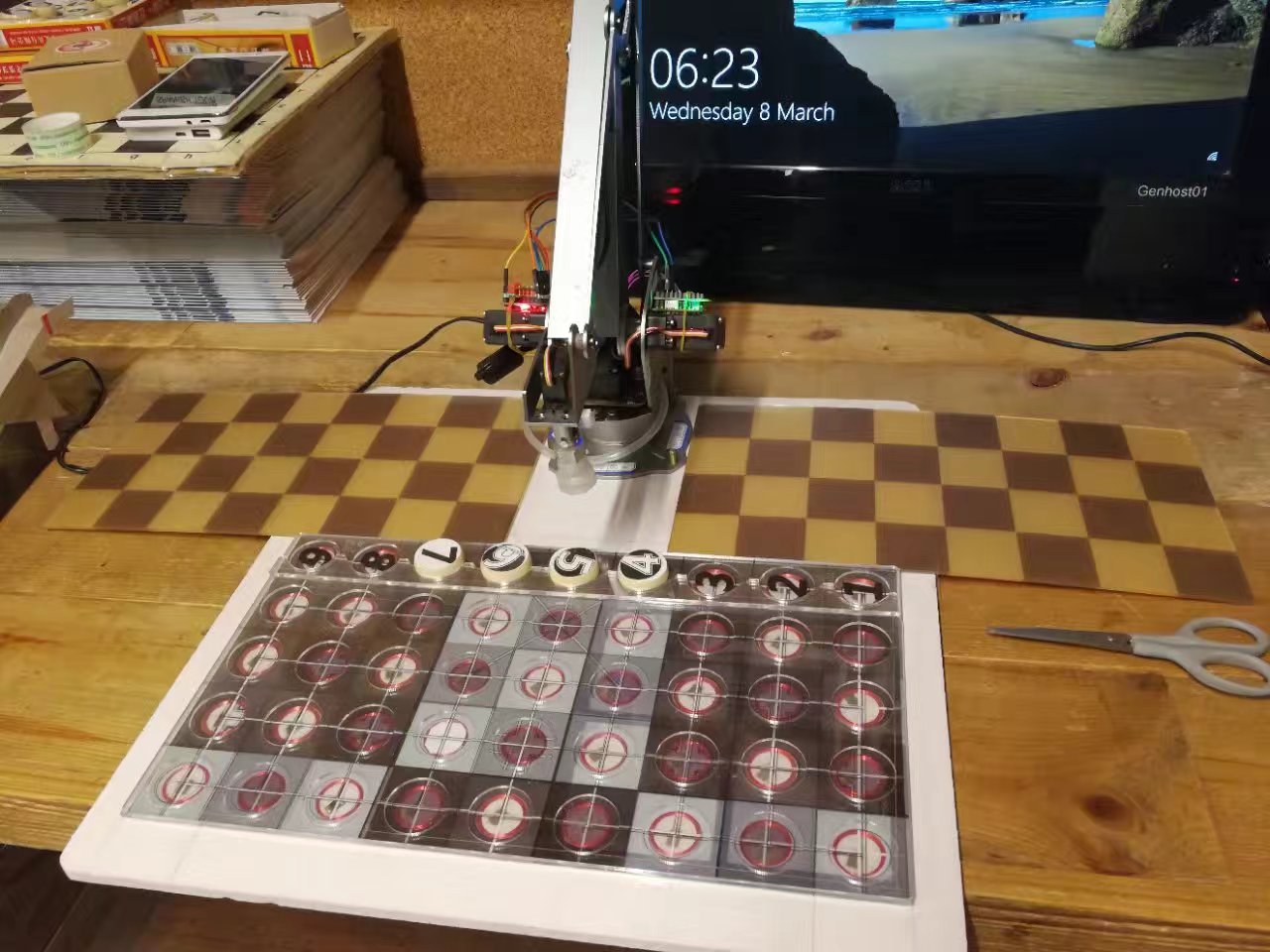
- Robotic arm PLATFORM, the above is a cloud chess board electronic control sensor array, limit plate, of course, but also a flame chess board ( machine understand which piece to move, the player should also understand)
- Sudoku slider, the most weak part, next version must change.
- Sudoku chess pieces (using Chinese chess pieces done, most general
traditional CHINIESE.CHESS pieces).
Mobile phone connecting two boards. This time no time to connect with the domestic. Two mobile phones using text messages can control the remote robot arm chess, and then pass the child’s smile, from VIDEO live.- Long wire board, any power supply could be connected.
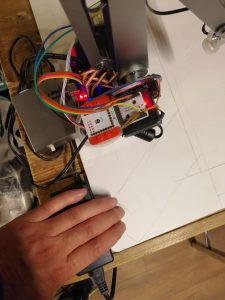
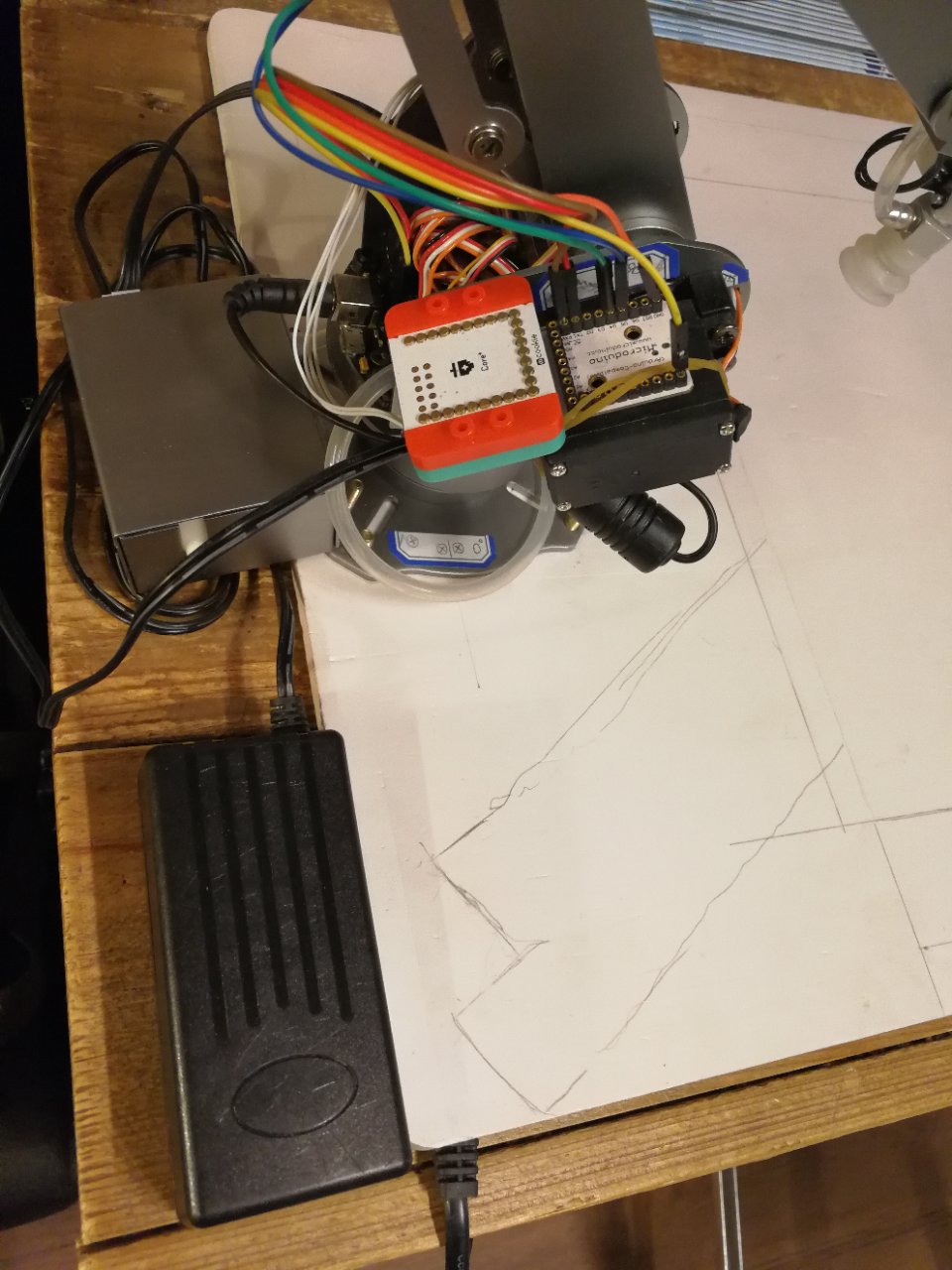
(above was written at 2:26am ). CORE+ and the power cord is fixed at the right, the Bluetooth module is fixed on the left, and UARM is equipped with a wireless function to accept the phone’s instructions. This is the ready main arm (left arm) [proud] ( 2:35am )



 to ASSEMBling the main Robotic ARM.
to ASSEMBling the main Robotic ARM.




. Before starting the assembly, each of tapes used to fixed was stripped. to view the lines used to mark. Cloud Chess Board, RFID sensor array layer, limit plate was clear to view. Especially the limit plate for the pieces of the slide down the “BAFFLE“, was the acrylic factory workers to help draw. the Each result of the show, the external is just the tip of the iceberg, the process has too many details. Fortunately, the flamechess is a story, the need is the plot. Flame chess robot is not a product, but a props, can be any “pose” [color] ( 3.29am )







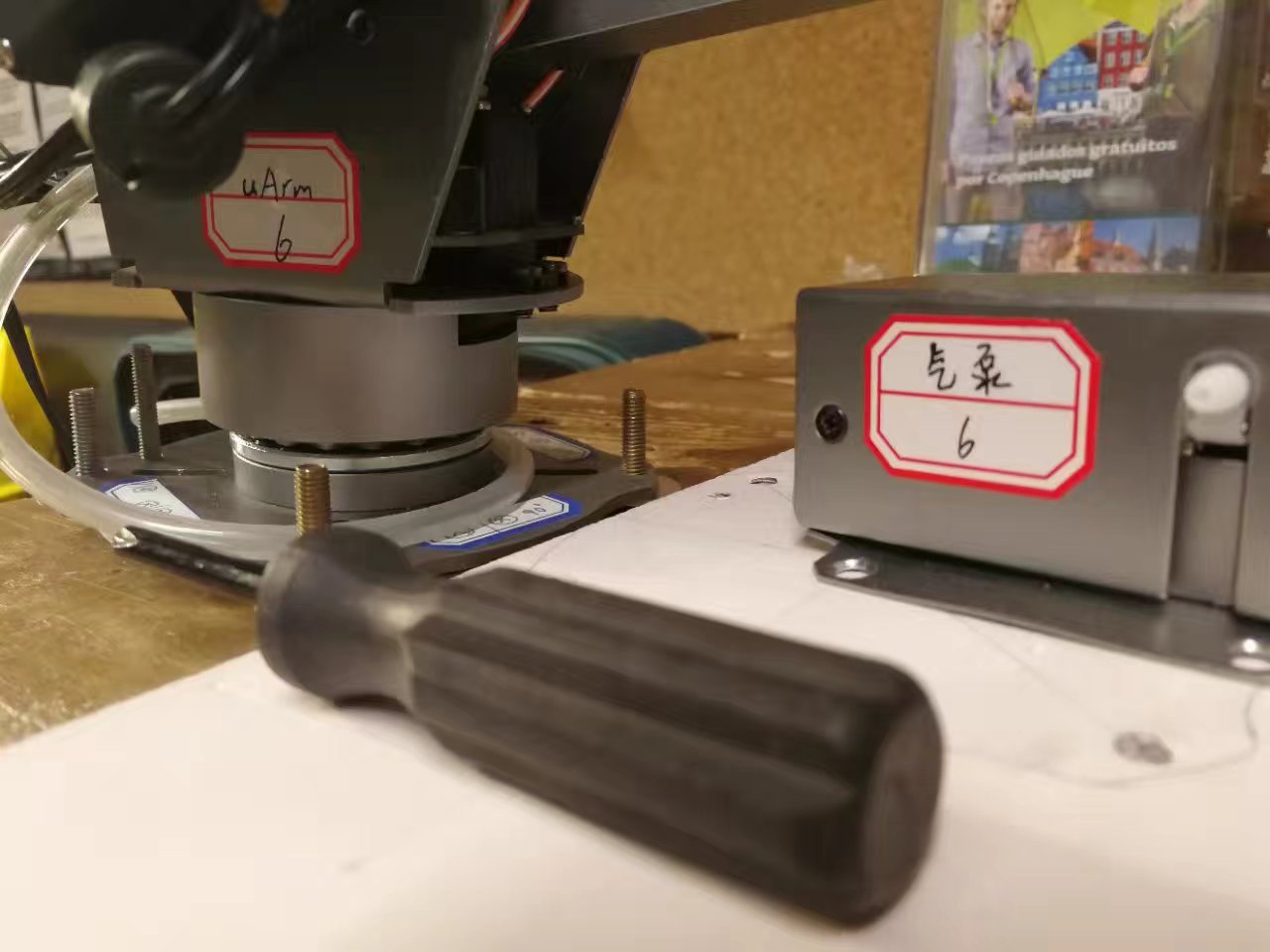
- No.6 air pump with No.6 arm (thanks to Geng teacher) each node has your assistance (flamechess gift towor cardboard sculpture in the community show, the young drone pilot was very skilled. the ZHONGGUANCUN and BAIZIWAN two community FlameChess group battle was shooting as a small video, very cool.). Easy to use the small screwdriver came from the IKEA furniture. So that the standardization tool is the basis of industry.
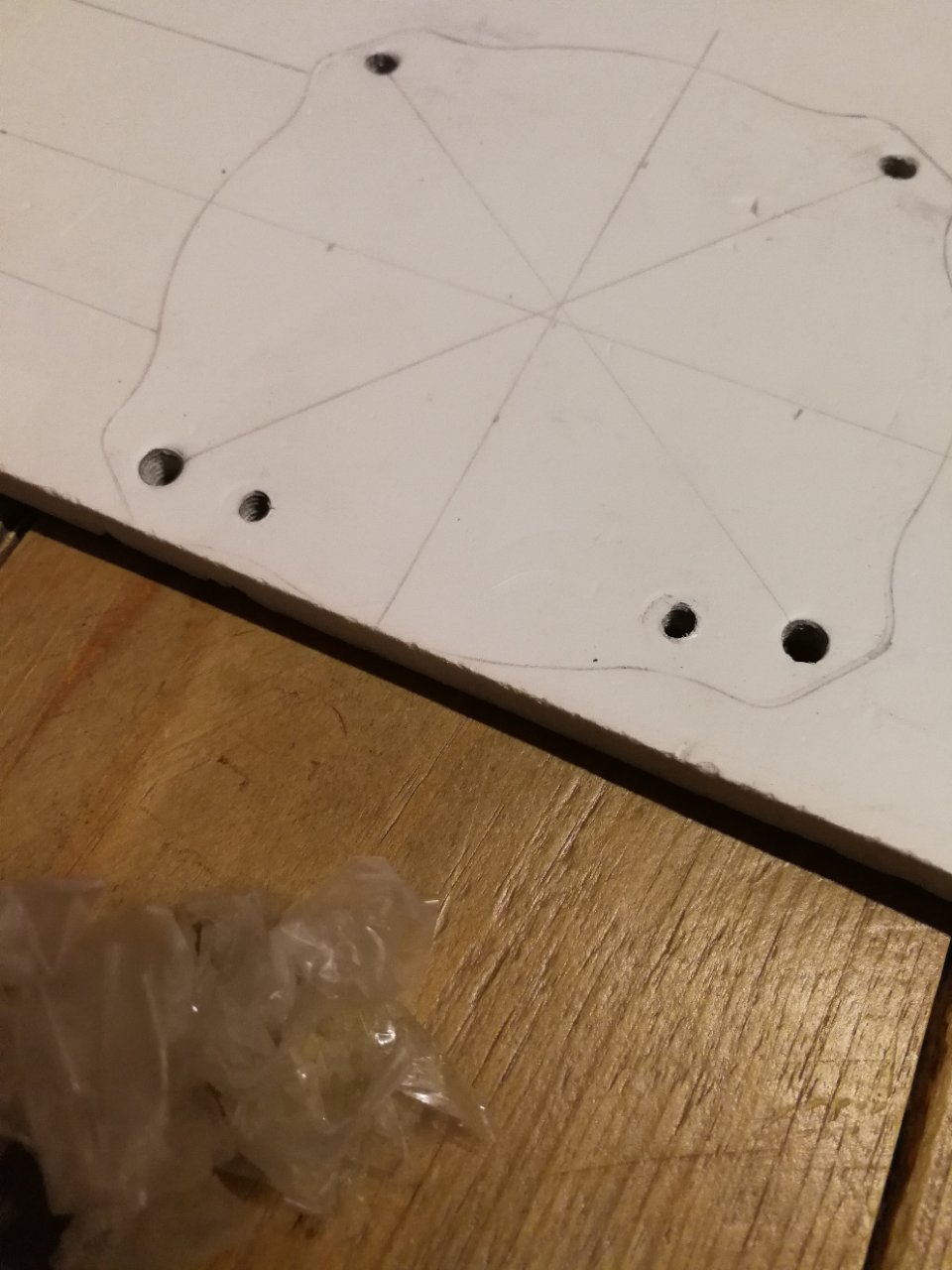
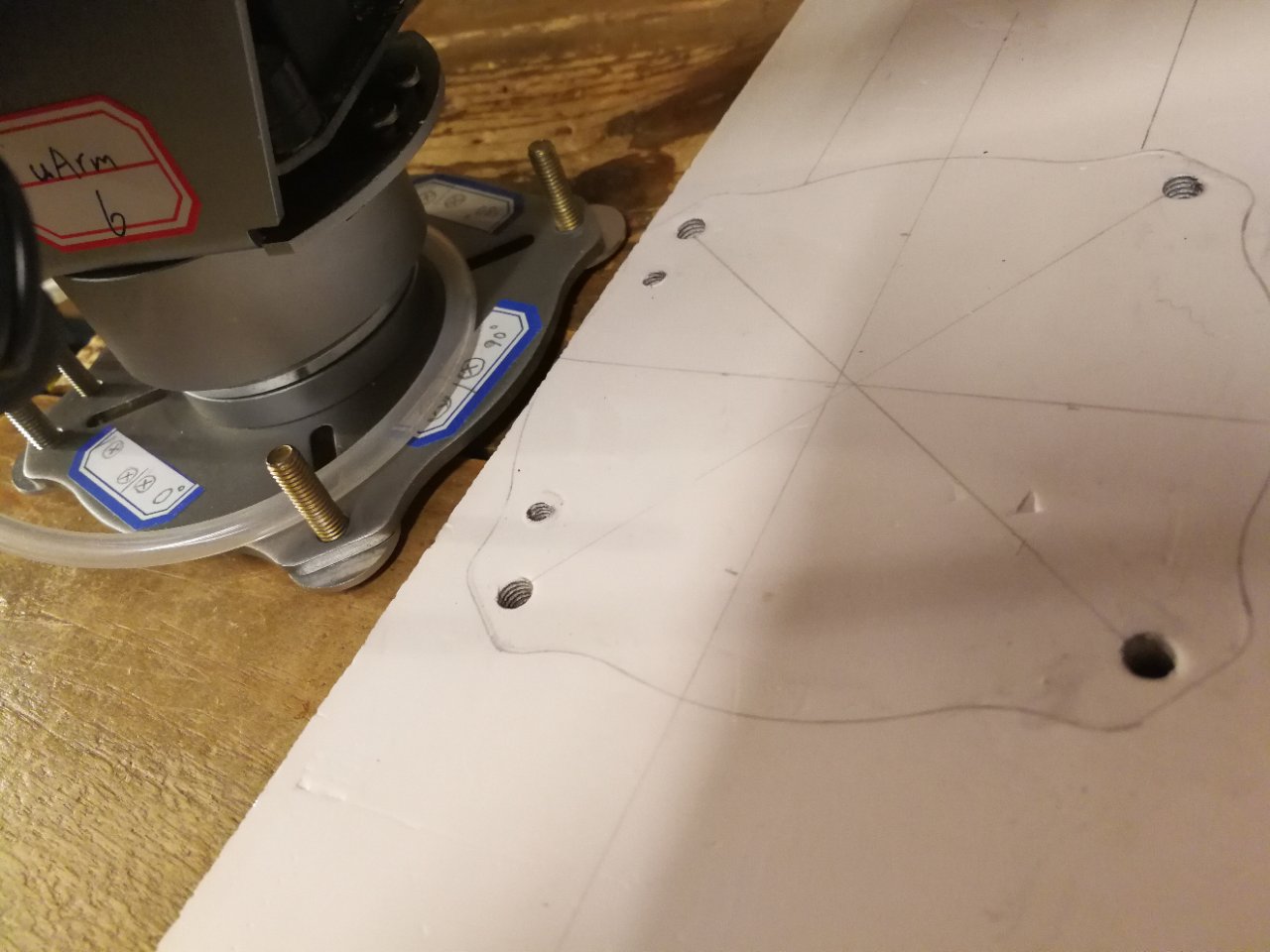
- Place the screw in the same position, including the gasket, in-situ assembly, in order to ensure the minimum deviation.
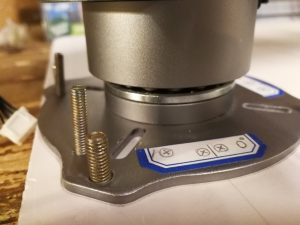
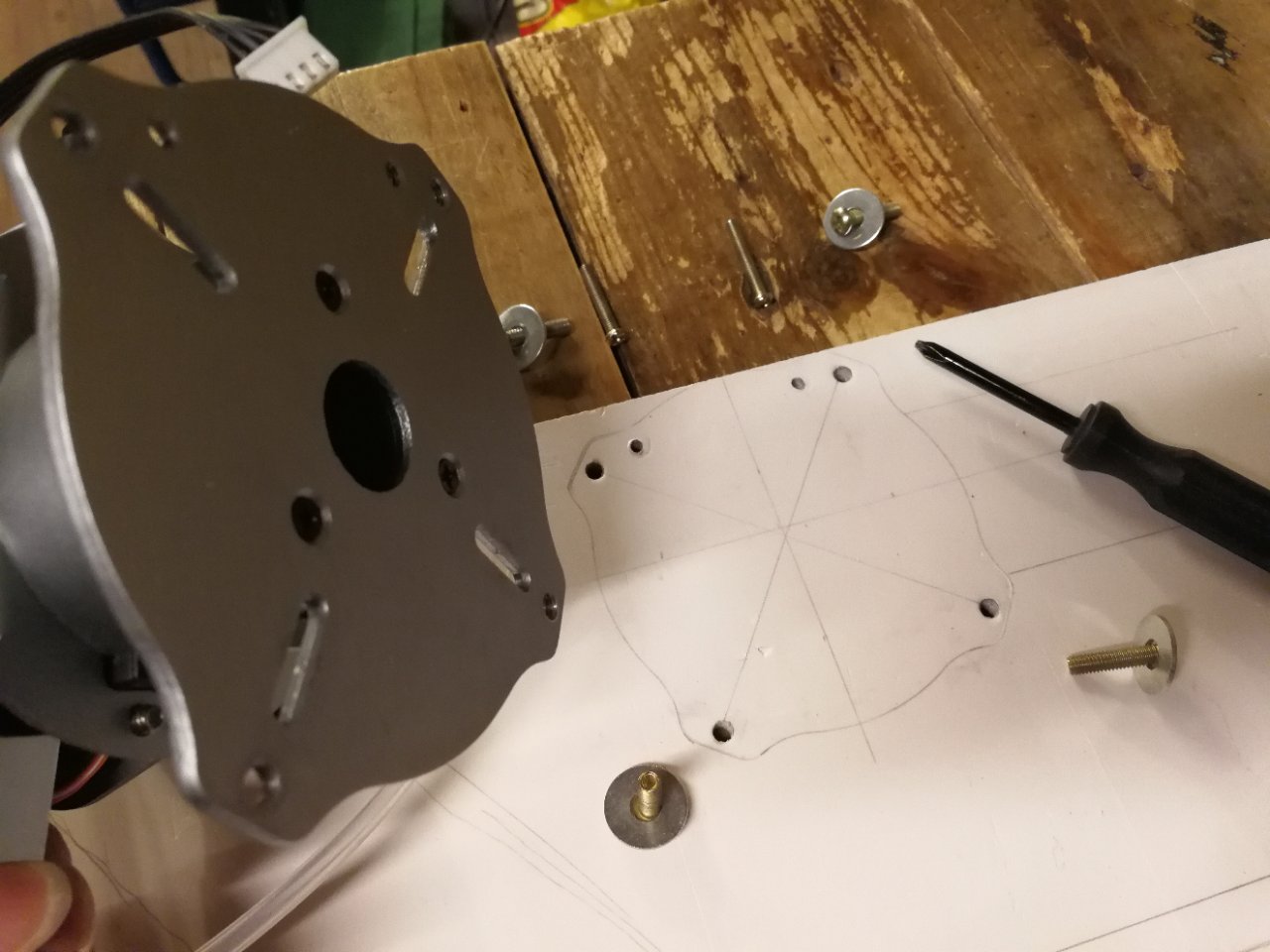
- to tighten the screw just penetrate the PLATFORM of the arm.
- penetrate the base of the ARM.
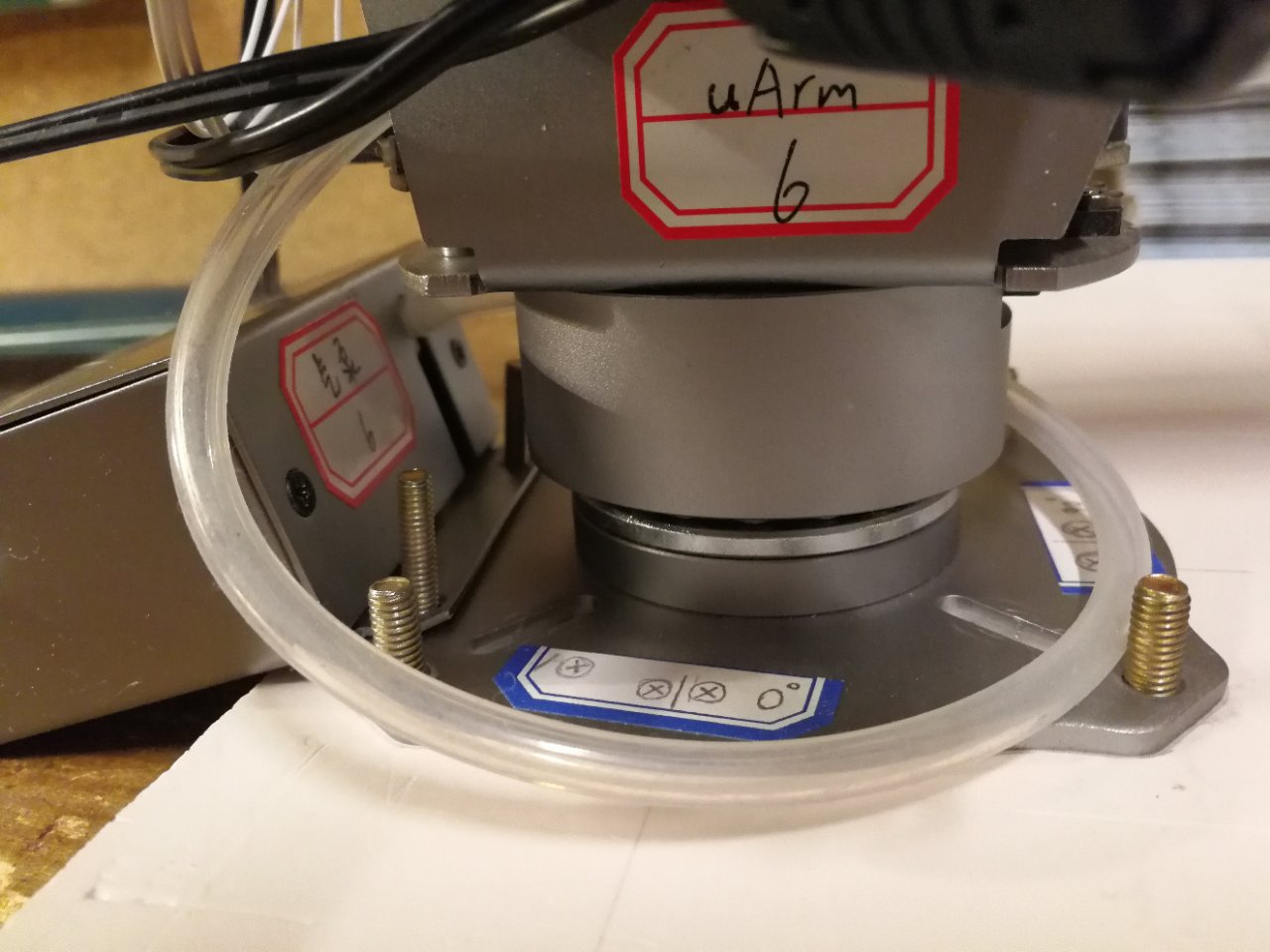
- Fixed (the diagonal screw first tightening, and finally stay 2 laps, and then alternately twist 1 lap, then the diagonal line in turn, last half lap to tighten, using the PVC platform’s elastic to enhance stability.)
- Wrap the hose to the arm base, the screw long out of the base, can fixed the hose. this feature [bared teeth] only non-standard accessories was have. it’s came from hardware shop on the roadside.
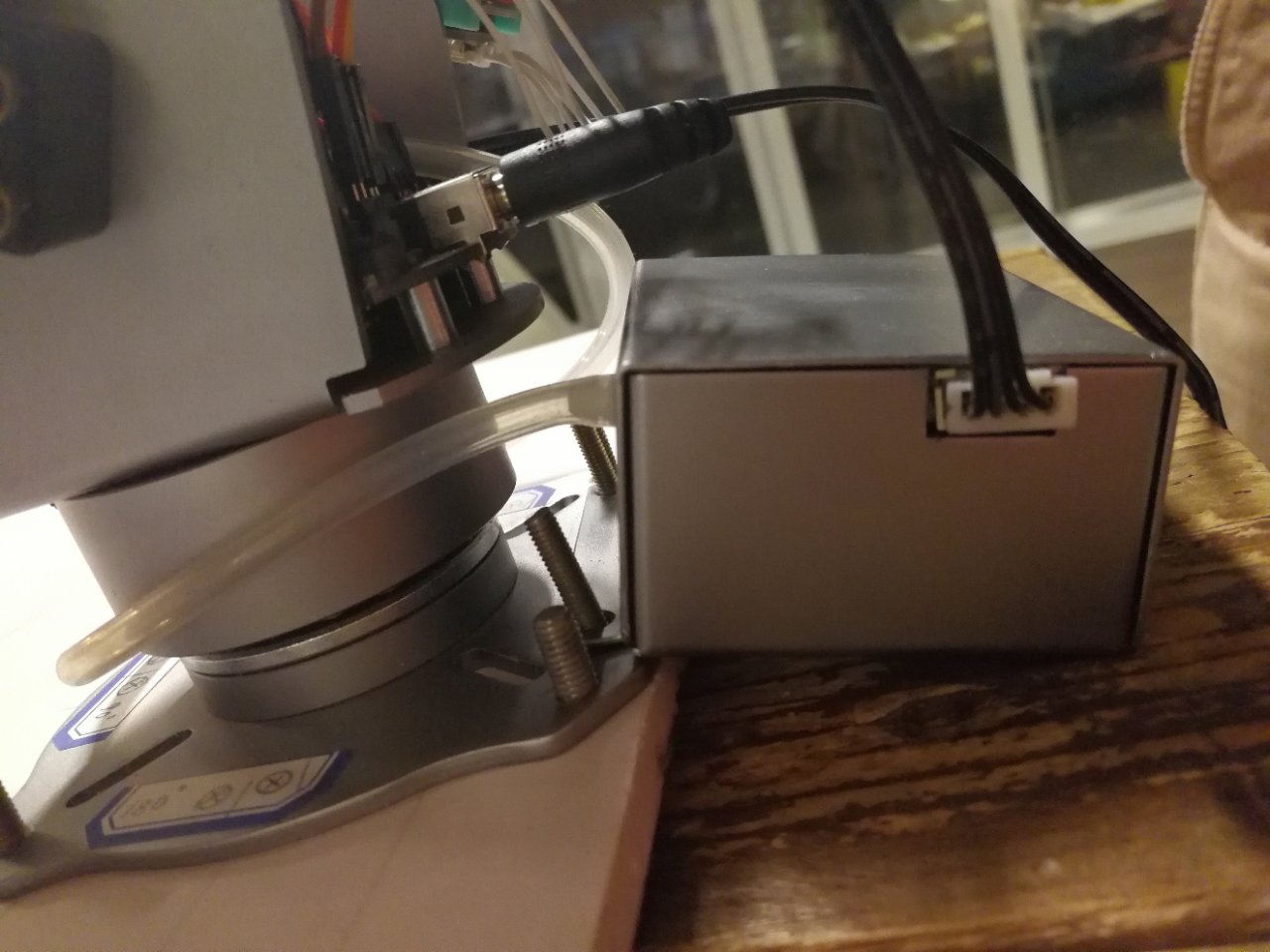
- Connect the pump power supply
(from the mainboard power supply of the robot arm).- Air pump, external power supply layout.
- Welldone (UARMmetel) The last post LOGO on the other side. Yesterday morning went to the Copenhagen University of artificial intelligence and robot lab to introduced the idea to professor . He actually recommended UARM. I said that is the now selection. He was surprised [proud]. this Just to know What this electronic toys be welcome by foreigner. ( 3:48am )








 TESTing the Main ARM.
TESTing the Main ARM.





- Connected the power supply, The adapter buyed at the third time to visit Denmark, also Sweden, Norway, the Netherlands, the first time to DK also DIY a plug. Arrange cablea & waiting power on.
- Zero degree limit check whether the cable was around the neck.
- 180 degree limit check (around the neck is the obstetric terminology, the robot baby was the rhythm of delivery exam. 🙂
- ON ( the power )
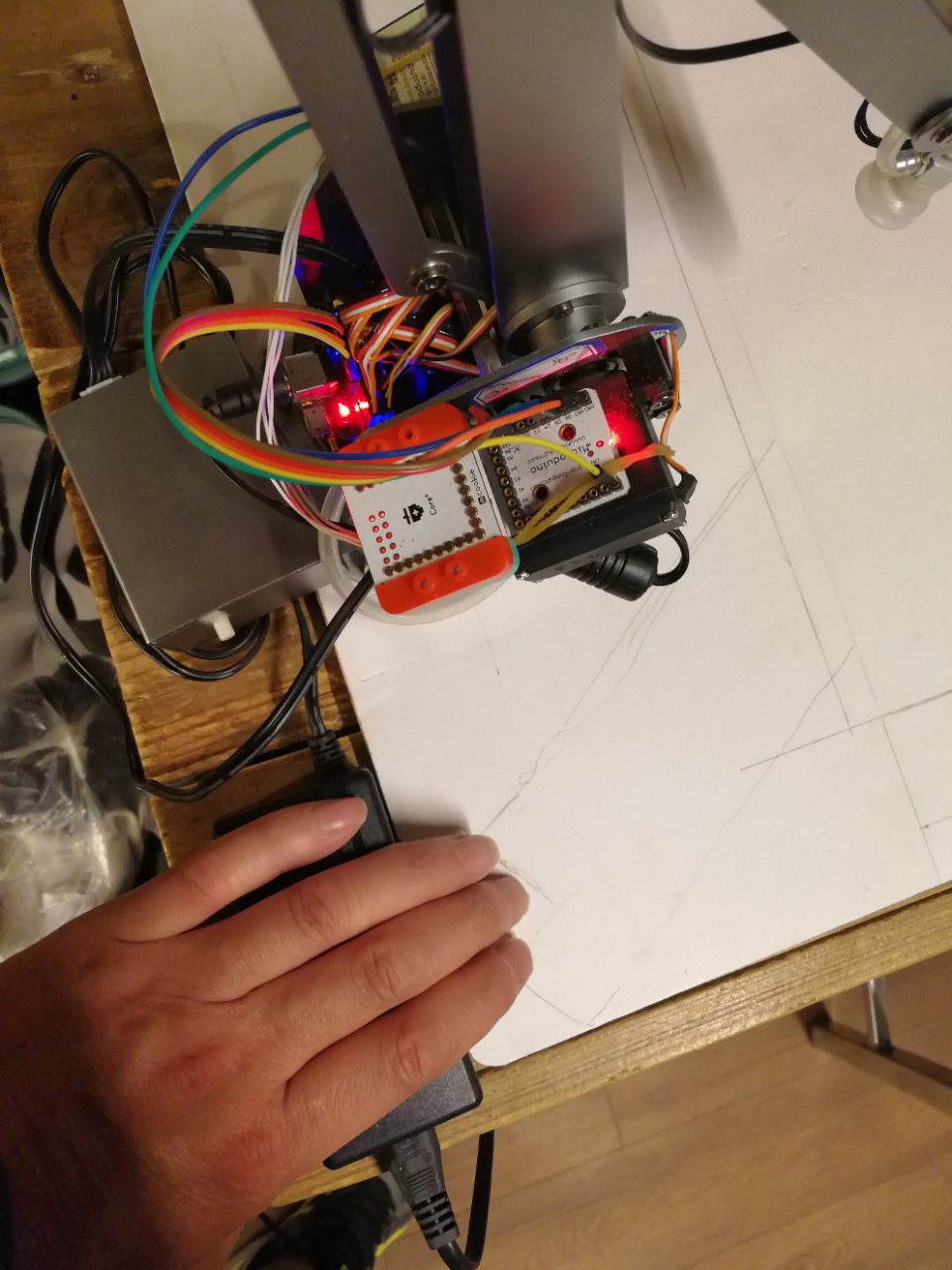
- Red light, Wake up, looks like eyes of Transformers.
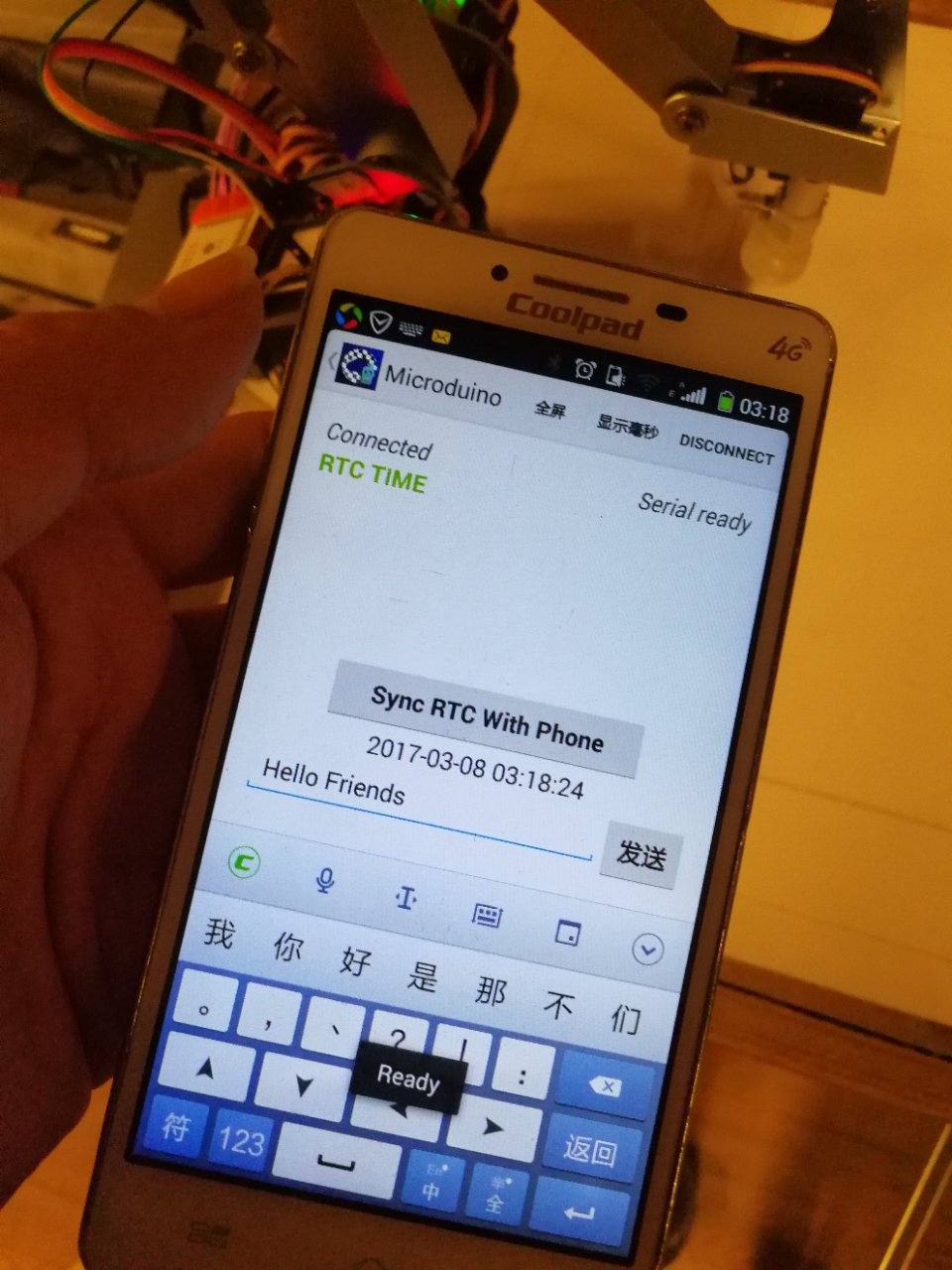
The Cloud Chess Board APP’s device appears in the list.- READY.
- This’s a solid advertising for MircoDuino ( small body large energy ). This Android version was the open source project, the source of the cloud chess board. This work was done by a stuff of Microduino, this guy’s named “Wen Tian drum”. UARM LOGO appeared at the 180-degree limit in the photo 3. ( 3:58am )
. That’s put the first number on the standard Sudoku chess board target location, should be the first squares of the first house. The program already into my mind. the chess arm project CHESSARM was relesed to GITHUB before visit Denmark. Two URLs can find clues. upfuture.org has just released schedule to Denmark. CHESSduino.org All ARDUINO projects about the cloud chess board can be found.
. this morning will OPEN OPEN OPEN at Copenhagen, Denmark. To meet more teachers to join us for kids to learning chess well. Yesterday morning at the University of Copenhagen AAU before college students allready had the “speech” . English words SPEECH more suitable TO me. If writing was not well, just express face to face, plus body language, as long as you want to tell other. ( 4:09am )


 Cloud Chess Board® TESTing
Cloud Chess Board® TESTing







- Check the Cloud Chess Board.
- Found multiple devices.
- BB:68 is cloud chess board, another is the robot arm.
- Ready.
- Cloud chess board and control robots are one-to-one correspondence. Chose a traditional chess board, is an early version of the power supply module, microduino 1.0.
- turn the Power on , the green light shows the battery need charging. (the test was necessary)
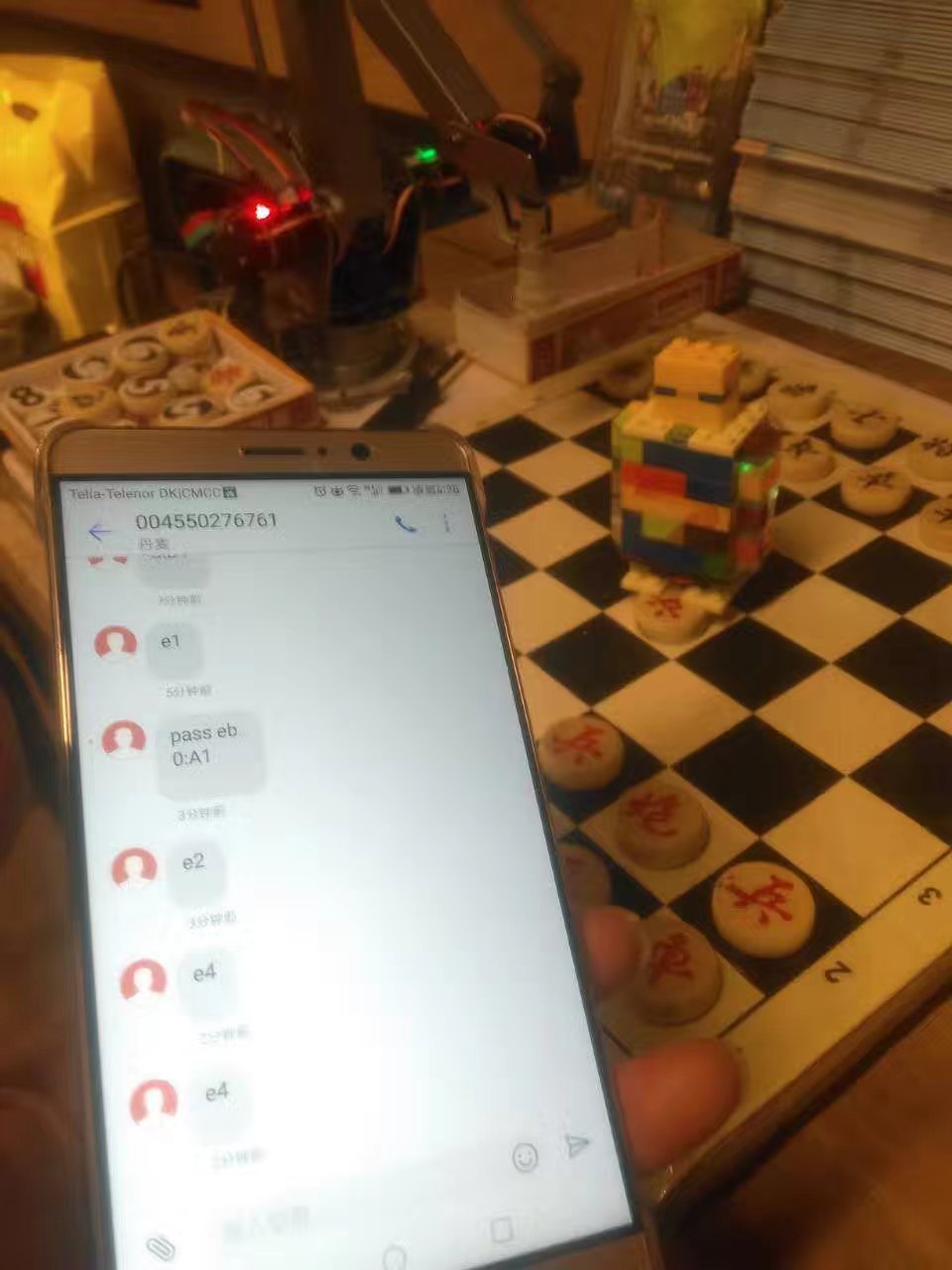
- The initialization position A1 (pass)
- e2 – e4, the robot standing on the chess piece.
- Each chess pieces move all through the GSM network, in short messages sent to another phone. ( using my number, cost was the international SMS charges.) ( 4:54am )






 Right ARM (slave arm)
Right ARM (slave arm)



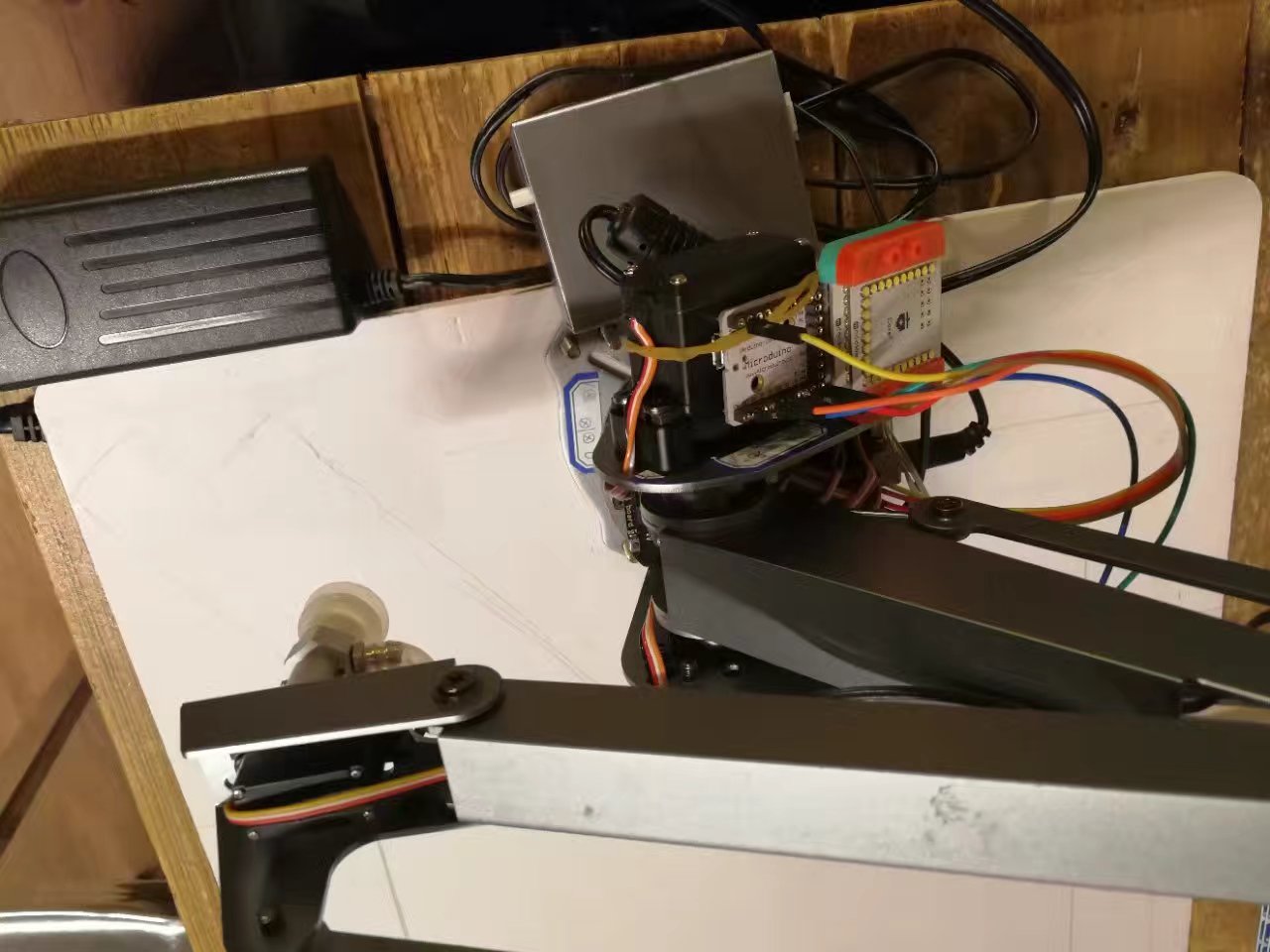
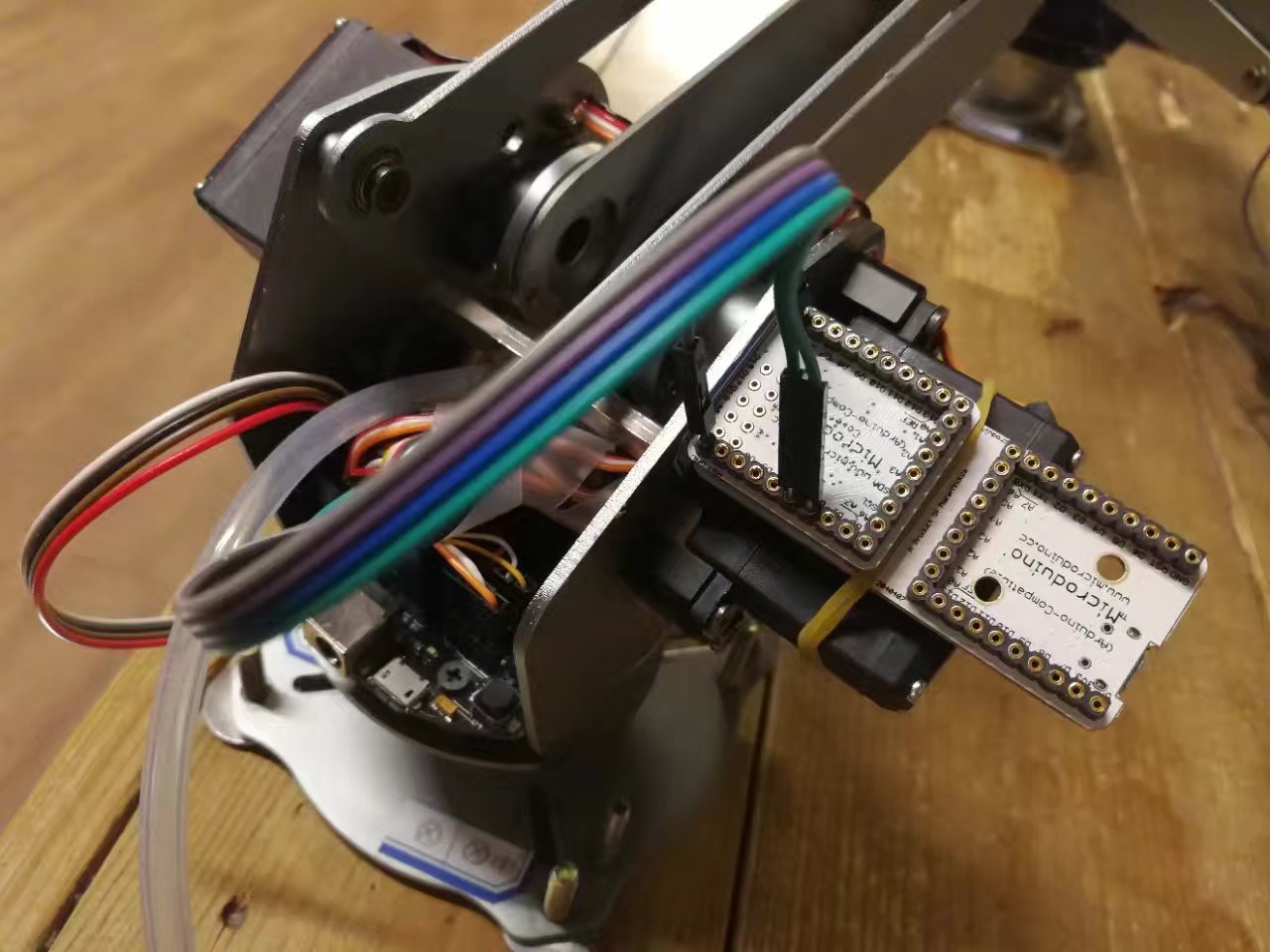
- Right arm ( slave arm ) more simple,
only has bluetooth module (FIG. 2),- to receive the main arm forward control signal, from mobile phones. Need left hand and right hand to cooperate, UARM “fatal problem” is the short hand. standard Flamechess board has 90 block, 38 mm x 38 mm for each and 9 x10 (FIG. 3 is half sudoku board.)
- Too “big” for UARM, one arm only cover for more than half, 6×9 minus 2 (because the two blocks far from arm center can’t reach [pie mouth]). This morning the chess event will not to show the left hand and right hand cooperation. The right hand is posed. (don’t start the program in the robot arm. you interested it can look at the source code at GITHUB, fig. 5).
- The last Fig is final Right arm( slave arm ) presentation, three layers (sensor board, sudoku board, limit board), put on the robot platform, Without fixed, easy to equip.



 Main ARM 2nd TESTing in REAL.
Main ARM 2nd TESTing in REAL.








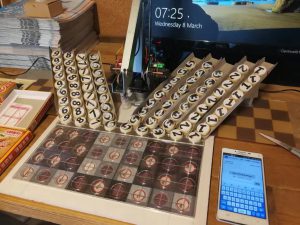
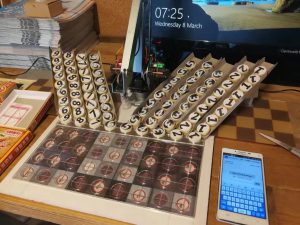
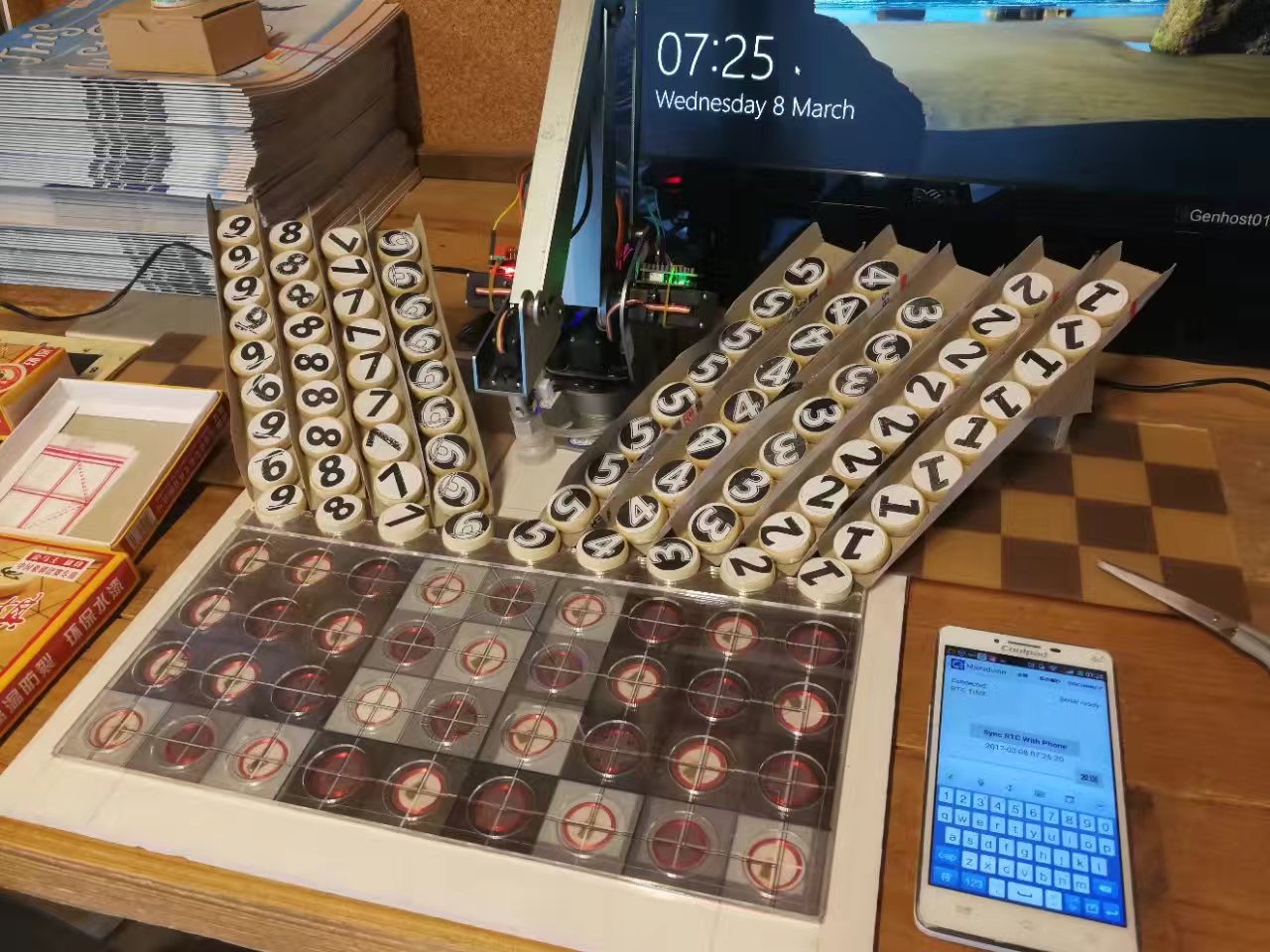
- Main arm real tesing, the pieces can be marked in any number, even if symbols or graphics. In the mind of the robot (program) is considered to be the index number 1234. It is a computer model about sudoku.
- overlooking in other side, ready to power.
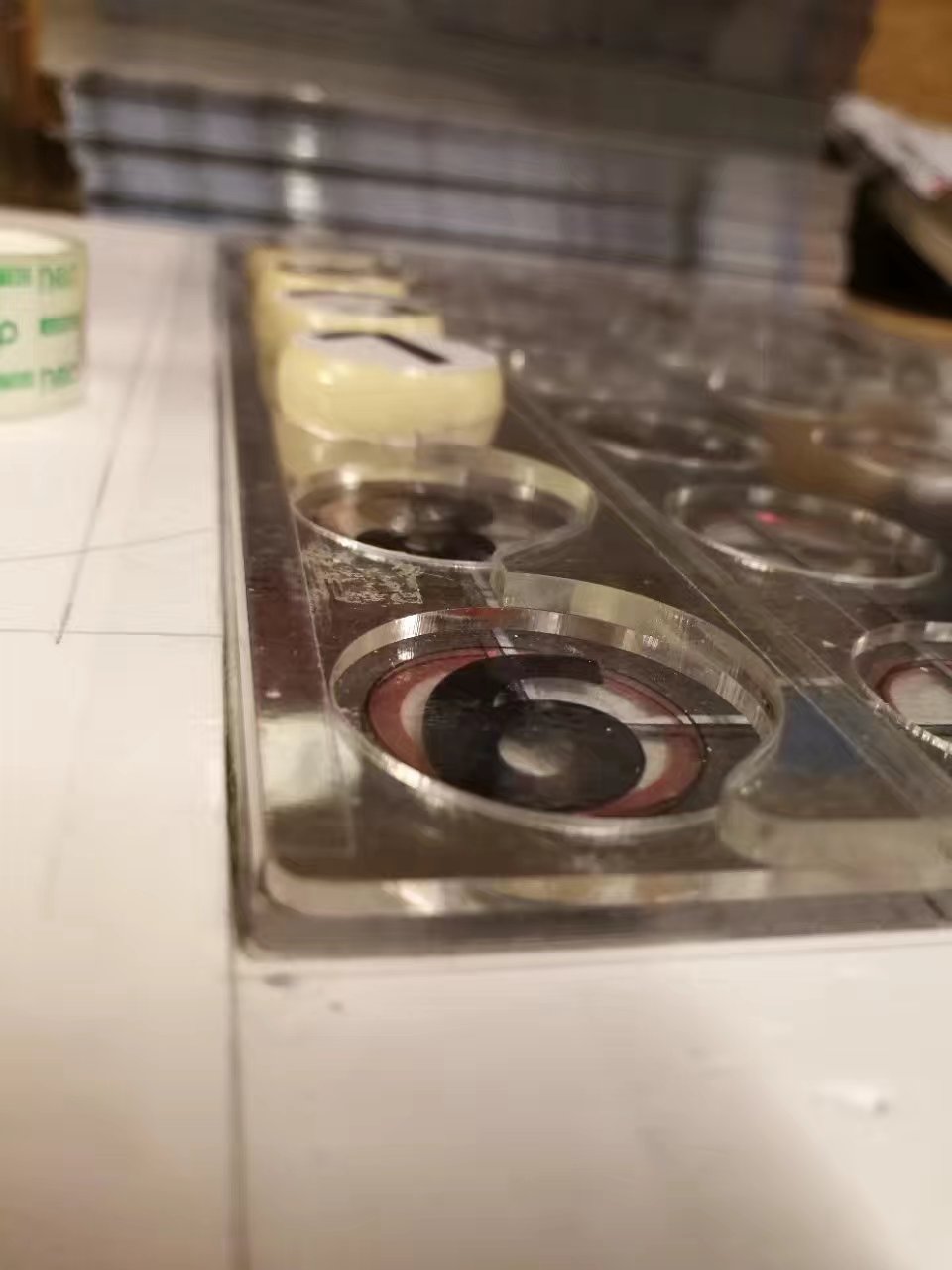
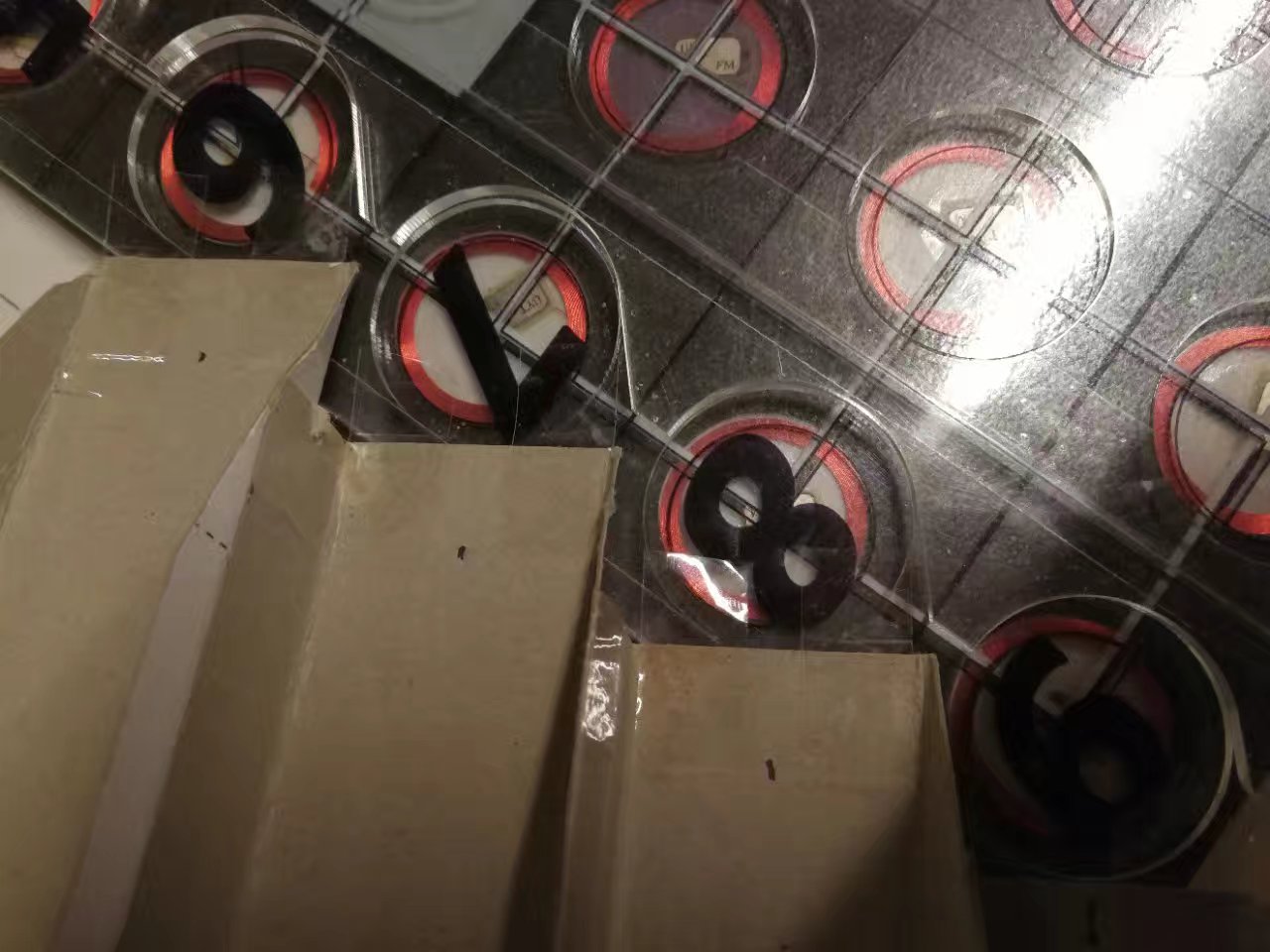
- limit board of Sudoku slider had double layer, a detail pictures. scale line on the PVC plate, using for reinstall it, only need testing one time , then to success.
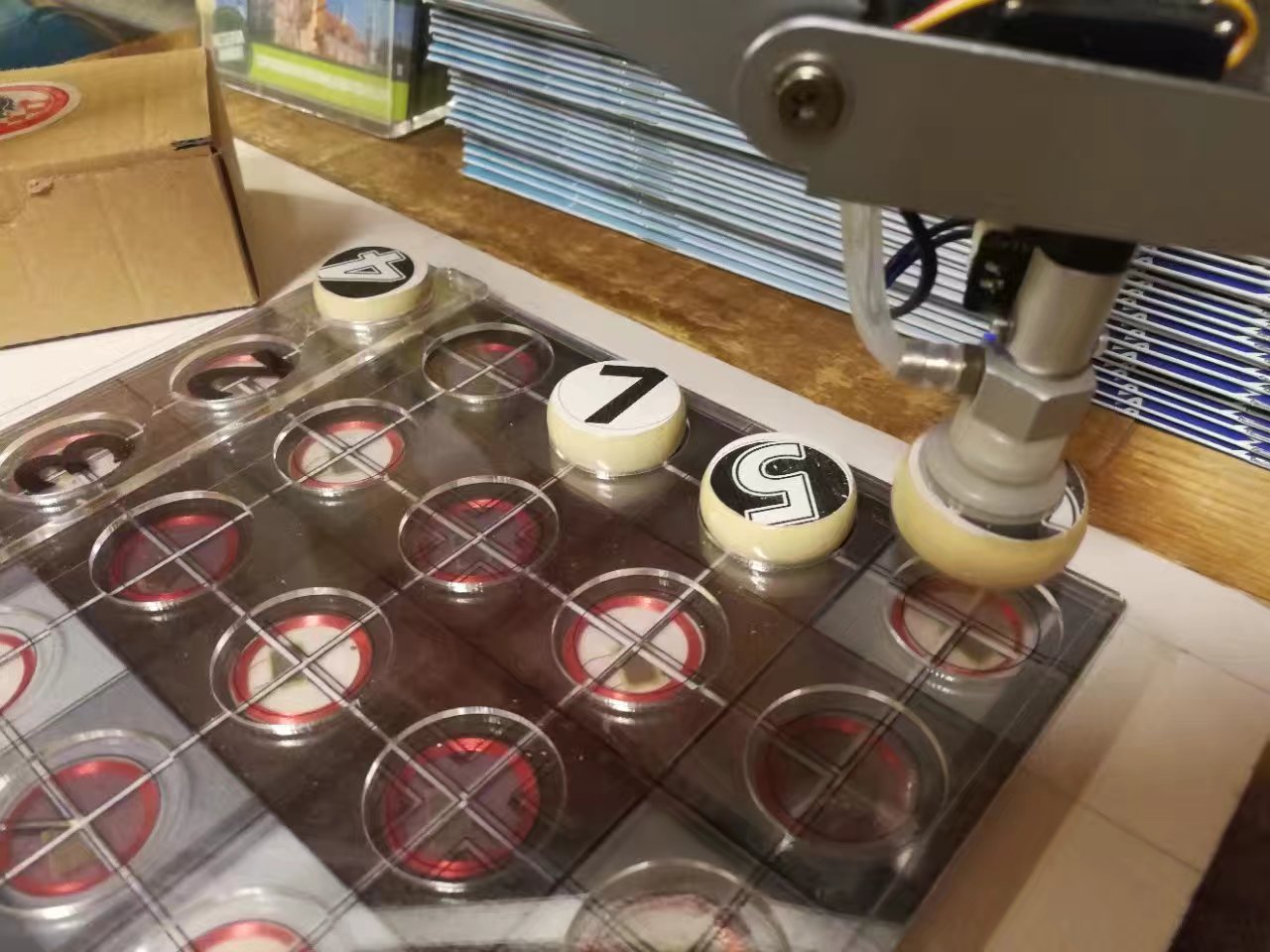
- locate in the digital pool (all numbers got from the reference coordinate index 123456789)
- catching (pumping)
- moving (robots to Sudoku results target position, like writing numbers, the robot just throwing pieces, It’s only a kid. 🙂
- release (air pumper turns off)
- it was too close near the “wall” at digital pool (Figure 1), so it was not in place. 2nd times it’s in place.
- test results, perfect.






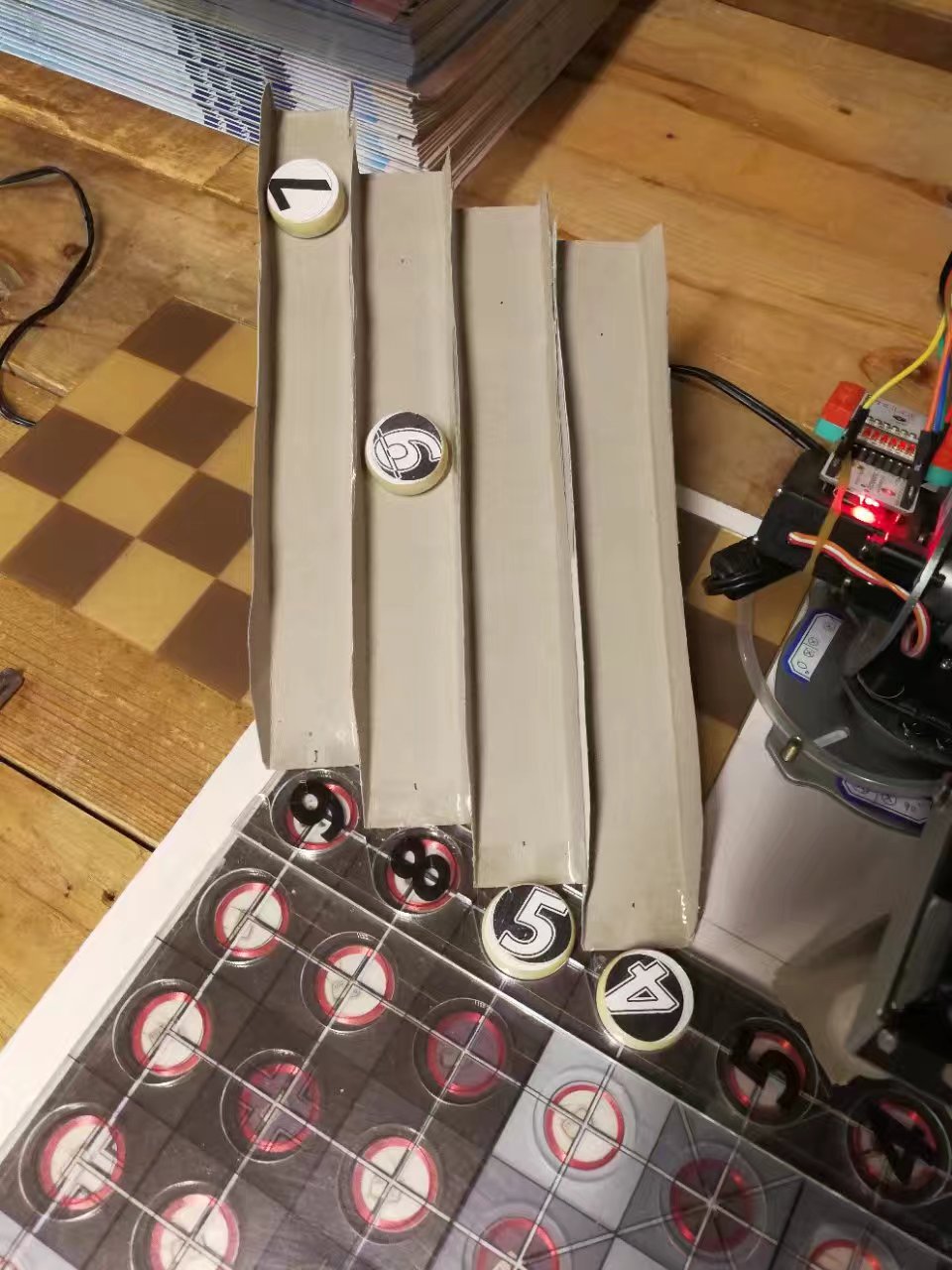
 SUDOKU SILDER
SUDOKU SILDER
. This’s Sudoku slider. Half of pieces testing is finished (perfect), it’s slippery, in the safety of the premise, can not slip out [smile]. ( 6:40am )







- This’s the Sudoku slider look like. just Put it on 1st, including the diary writing to wechat, already 4 hours.
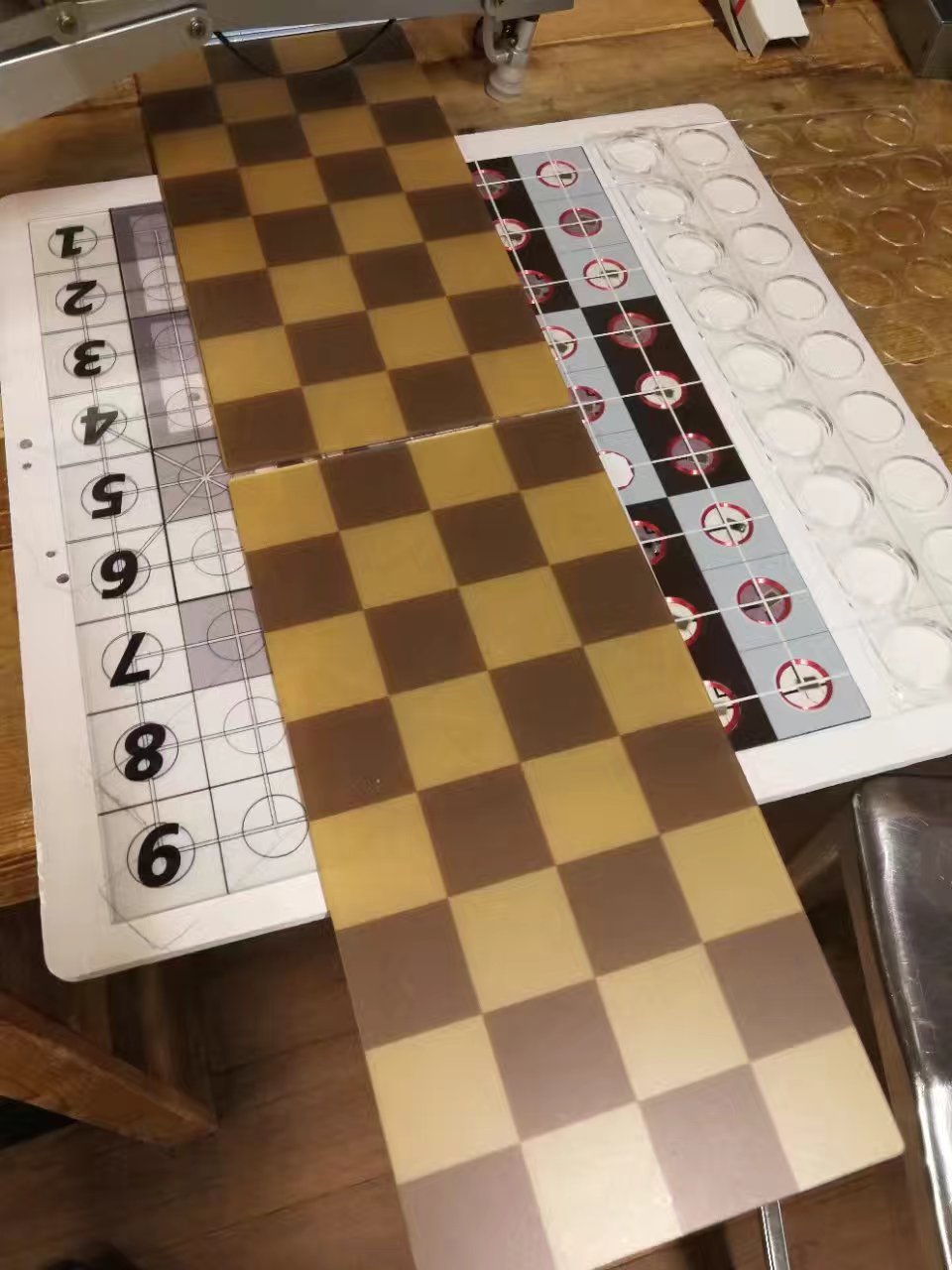
- All sliders together were too wide then the robot arm platform, adding the expansion board in two side (using acrylic chess board).
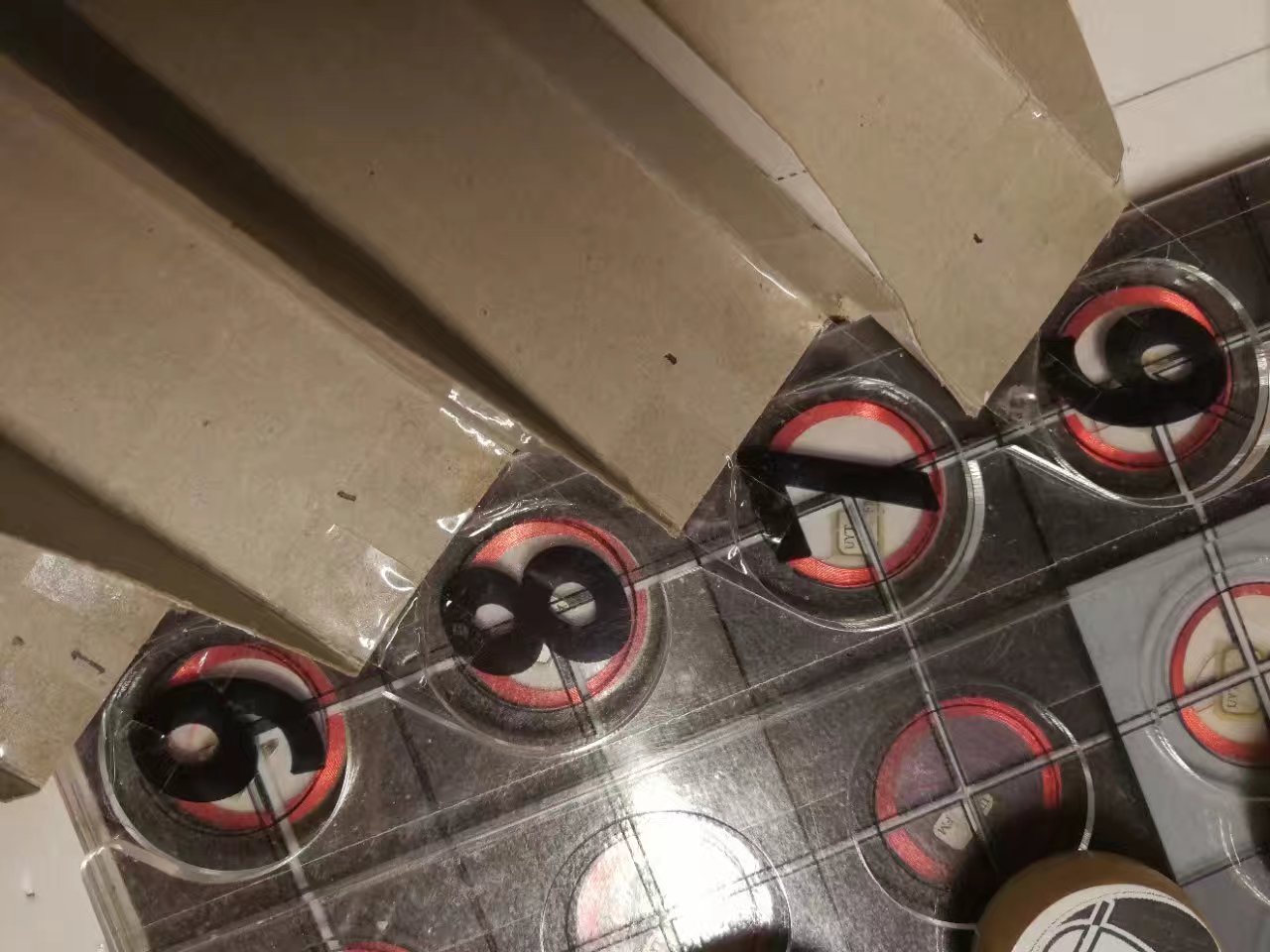
- using transparent sticker to connect slider with chess board. (it’s prepare process) (Fig. 4) Sudoku pieces start position, details about the limit board of digital pool . (Fig. 5) this four slider was half of whole nine, stick it starting from the distal end of the ladder then nearest one. First placed in the position, do not worry stick in place one time. (Fig. 6) overlook. (Fig. 7) pressing the transparent sticker on to the end of the digital pool. (Fig. 8) It’s finished. (Fig. 9) that’s the way the pieces glide. (short video above)
( The friction of slides and pieces nearly 0 ) the inertia and multi pieces weight can drive the pieces into the pool. ( 6:53am )





 All was prepared, Waiting for START of …
All was prepared, Waiting for START of …



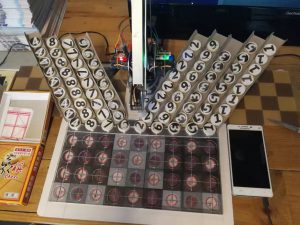

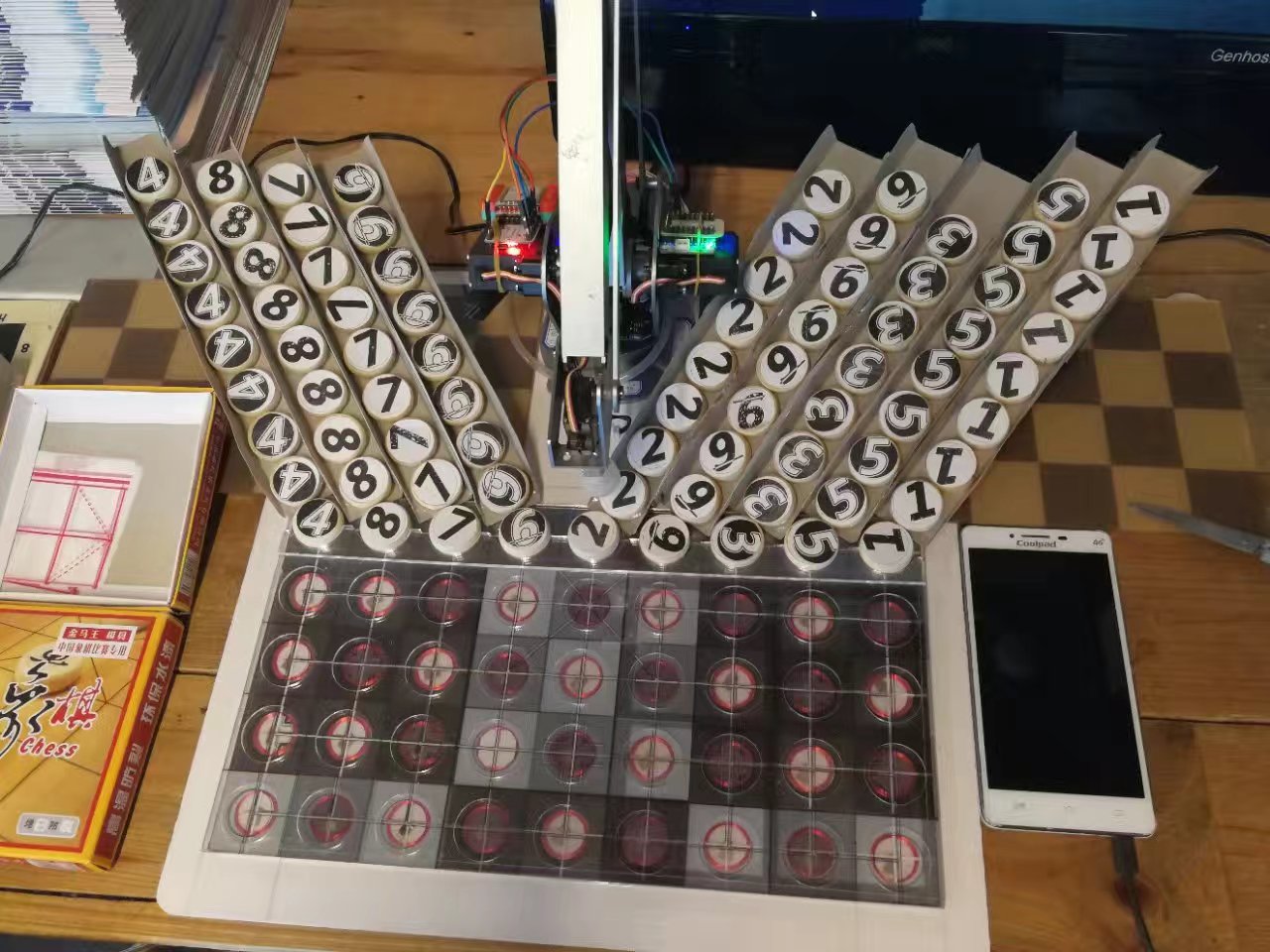
- final makeup, replacement with number of 1359, on behalf of Pawn, kNight, Rook, Queen.
- There’re two questions. This is the first question. To ensure the robot could random the different question each time.
- the start state, digital be replaced.
- the standard initial state, a line with 123456789.
- that’s the two standard Sudoku problem.
- Replace FlameChess “dice” with numbers of solving Sudoku.
- turn all numbers over can’t saw what number is it.
- The mission is let the children guess numbers,
guess wrong will stop move one time or move king.- Using the correct number to move pieces.
- First 6 number not need to check right or wrong,
move pieces directly like throw dice.- The first question of standard Sudoku, video recording is coherent, morning event have no problem, guarantee.
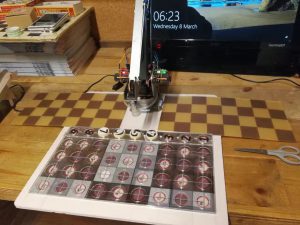
- STANDBY. GO (send message to robot from Andriod phone.) welldone, packed it, ready to going to the stadium. ( 8:05am )
. Ready, the last step pieces to move. Look around, and now in the early morning, the sun is shining on the terrace outside the cafe. Making some photos on the way. [sun sun sun sun sun]. ( 8:14am )





{kind=link}